 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Processes Semantic Map Representation
Paper and Code
Jul 05, 2017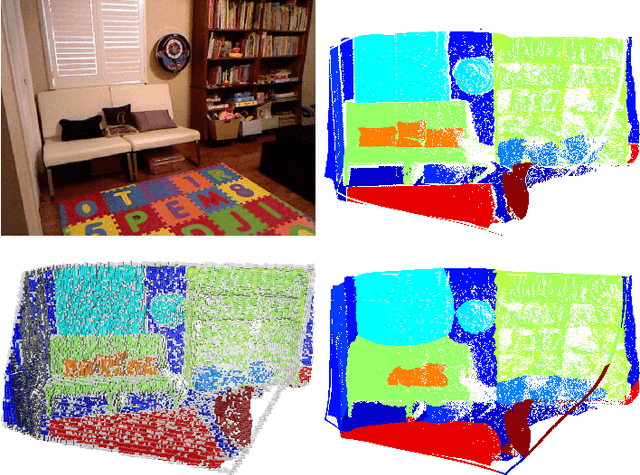
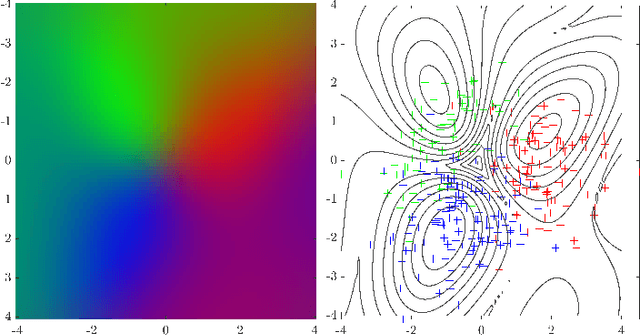


In this paper, we develop a high-dimensional map building technique that incorporates raw pixelated semantic measurements into the map representation. The proposed technique uses Gaussian Processes (GPs) multi-class classification for map inference and is the natural extension of GP occupancy maps from binary to multi-class form. The technique exploits the continuous property of GPs and, as a result, the map can be inferred with any resolution. In addition, the proposed GP Semantic Map (GPSM) learns the structural and semantic correlation from measurements rather than resorting to assumptions, and can flexibly learn the spatial correlation as well as any additional non-spatial correlation between map points. We extend the OctoMap to Semantic OctoMap representation and compare with the GPSM mapping performance using NYU Depth V2 dataset. Evaluations of the proposed technique on multiple partially labeled RGBD scans and labels from noisy image segmentation show that the GP semantic map can handle sparse measurements, missing labels in the point cloud, as well as noise corrupted labels.