 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGated Multimodal Fusion with Contrastive Learning for Turn-taking Prediction in Human-robot Dialogue
Paper and Code
Apr 18, 2022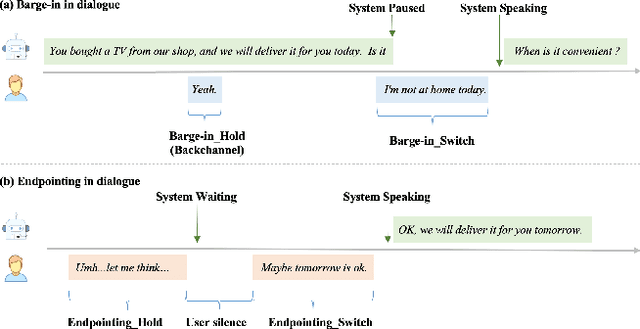
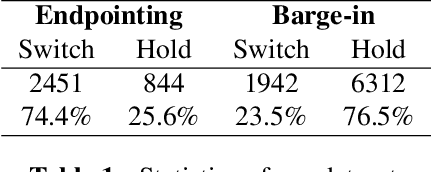
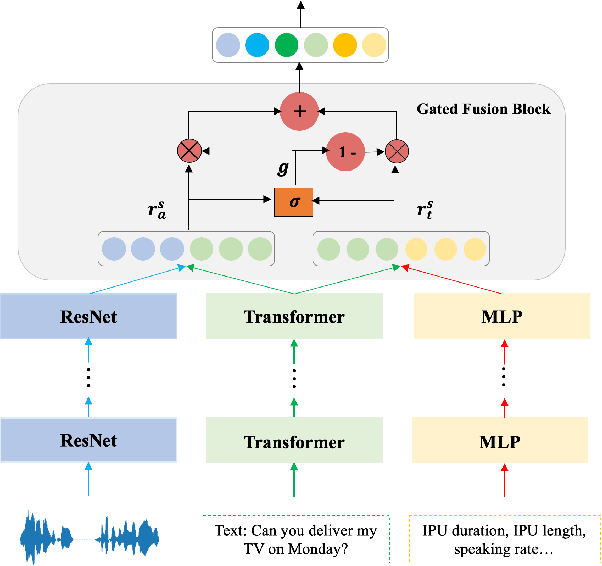

Turn-taking, aiming to decide when the next speaker can start talking, is an essential component in building human-robot spoken dialogue systems. Previous studies indicate that multimodal cues can facilitate this challenging task. However, due to the paucity of public multimodal datasets, current methods are mostly limited to either utilizing unimodal features or simplistic multimodal ensemble models. Besides, the inherent class imbalance in real scenario, e.g. sentence ending with short pause will be mostly regarded as the end of turn, also poses great challenge to the turn-taking decision. In this paper, we first collect a large-scale annotated corpus for turn-taking with over 5,000 real human-robot dialogues in speech and text modalities. Then, a novel gated multimodal fusion mechanism is devised to utilize various information seamlessly for turn-taking prediction. More importantly, to tackle the data imbalance issue, we design a simple yet effective data augmentation method to construct negative instances without supervision and apply contrastive learning to obtain better feature representations. Extensive experiments are conducted and the results demonstrate the superiority and competitiveness of our model over several state-of-the-art baselines.