 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGame-Theoretic Planning for Autonomous Driving among Risk-Aware Human Drivers
Paper and Code
May 01, 2022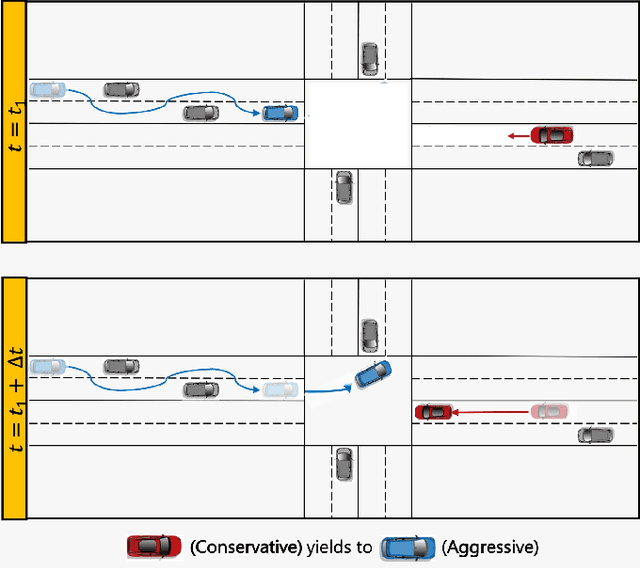


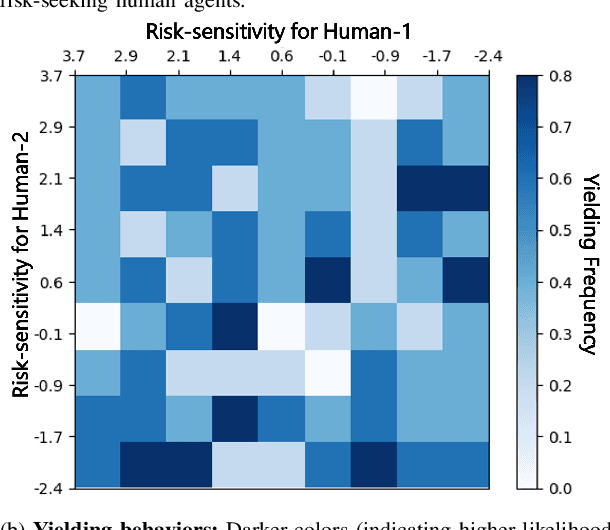
We present a novel approach for risk-aware planning with human agents in multi-agent traffic scenarios. Our approach takes into account the wide range of human driver behaviors on the road, from aggressive maneuvers like speeding and overtaking, to conservative traits like driving slowly and conforming to the right-most lane. In our approach, we learn a mapping from a data-driven human driver behavior model called the CMetric to a driver's entropic risk preference. We then use the derived risk preference within a game-theoretic risk-sensitive planner to model risk-aware interactions among human drivers and an autonomous vehicle in various traffic scenarios. We demonstrate our method in a merging scenario, where our results show that the final trajectories obtained from the risk-aware planner generate desirable emergent behaviors. Particularly, our planner recognizes aggressive human drivers and yields to them while maintaining a greater distance from them. In a user study, participants were able to distinguish between aggressive and conservative simulated drivers based on trajectories generated from our risk-sensitive planner. We also observe that aggressive human driving results in more frequent lane-changing in the planner. Finally, we compare the performance of our modified risk-aware planner with existing methods and show that modeling human driver behavior leads to safer navigation.