 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Bench to Bedside: The First Live Robotic Surgery on the dVRK to Enable Remote Telesurgery with Motion Scaling
Paper and Code
Sep 24, 2021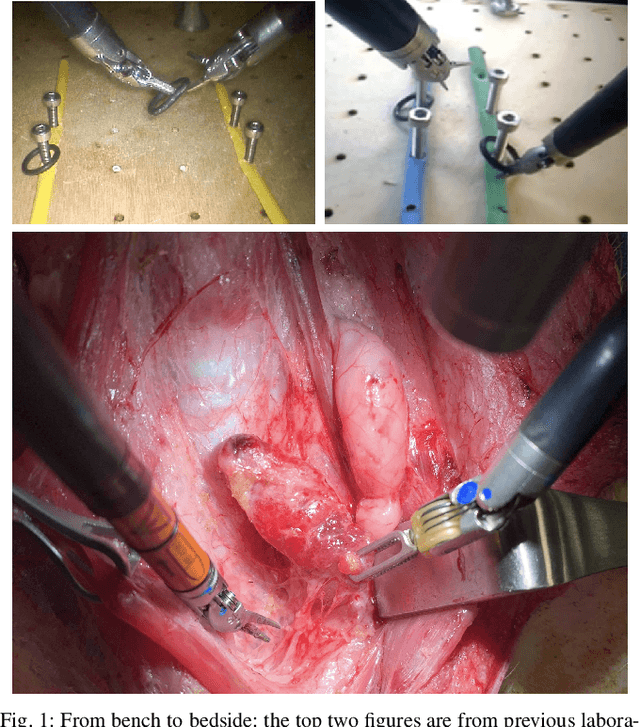
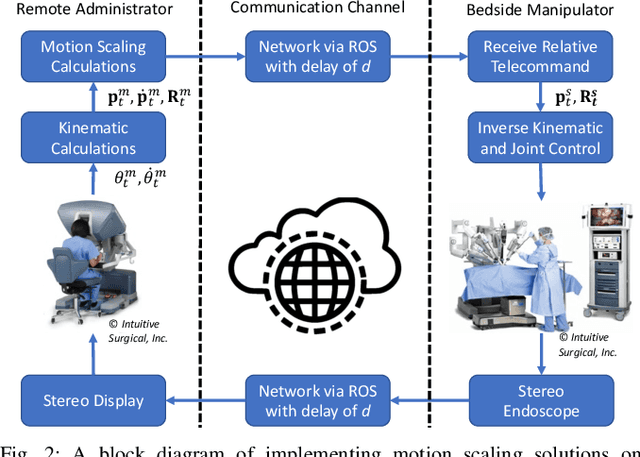
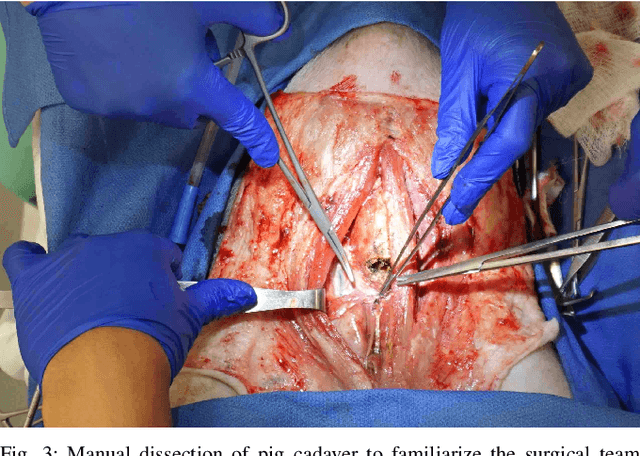
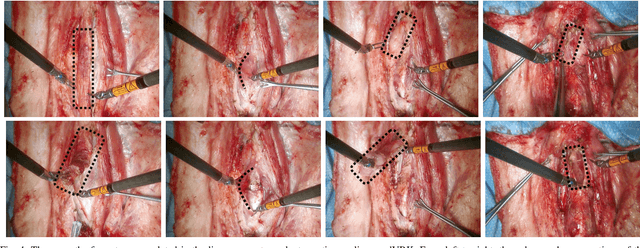
Innovations from surgical robotic research rarely translates to live surgery due to the significant difference between the lab and a live environment. Live environments require considerations that are often overlooked during early stages of research such as surgical staff, surgical procedure, and the challenges of working with live tissue. One such example is the da Vinci Research Kit (dVRK) which is used by over 40 robotics research groups and represents an open-sourced version of the da Vinci Surgical System. Despite dVRK being available for nearly a decade and the ideal candidate for translating research to practice on over 5,000 da Vinci Systems used in hospitals around the world, not one live surgery has been conducted with it. In this paper, we address the challenges, considerations, and solutions for translating surgical robotic research from bench-to-bedside. This is explained from the perspective of a remote telesurgery scenario where motion scaling solutions previously experimented in a lab setting are translated to a live pig surgery. This study presents results from the first ever use of a dVRK in a live animal and discusses how the surgical robotics community can approach translating their research to practice.