 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFreiHAND: A Dataset for Markerless Capture of Hand Pose and Shape from Single RGB Images
Paper and Code
Sep 13, 2019


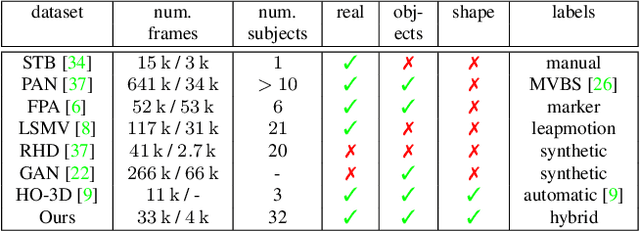
Estimating 3D hand pose from single RGB images is a highly ambiguous problem that relies on an unbiased training dataset. In this paper, we analyze cross-dataset generalization when training on existing datasets. We find that approaches perform well on the datasets they are trained on, but do not generalize to other datasets or in-the-wild scenarios. As a consequence, we introduce the first large-scale, multi-view hand dataset that is accompanied by both 3D hand pose and shape annotations. For annotating this real-world dataset, we propose an iterative, semi-automated `human-in-the-loop' approach, which includes hand fitting optimization to infer both the 3D pose and shape for each sample. We show that methods trained on our dataset consistently perform well when tested on other datasets. Moreover, the dataset allows us to train a network that predicts the full articulated hand shape from a single RGB image. The evaluation set can serve as a benchmark for articulated hand shape estimation.