 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFPNN: Field Probing Neural Networks for 3D Data
Paper and Code
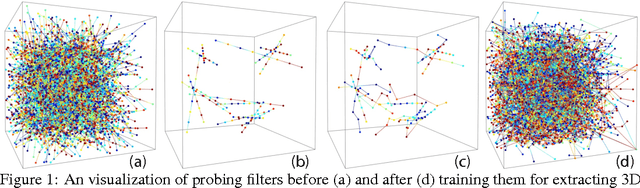
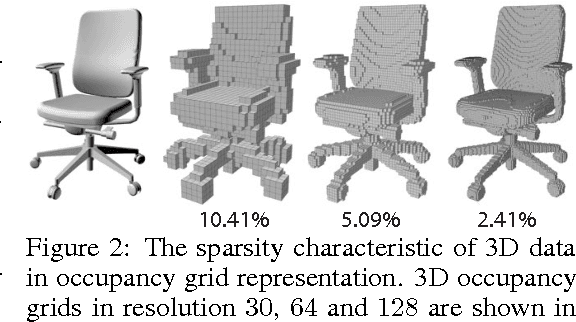
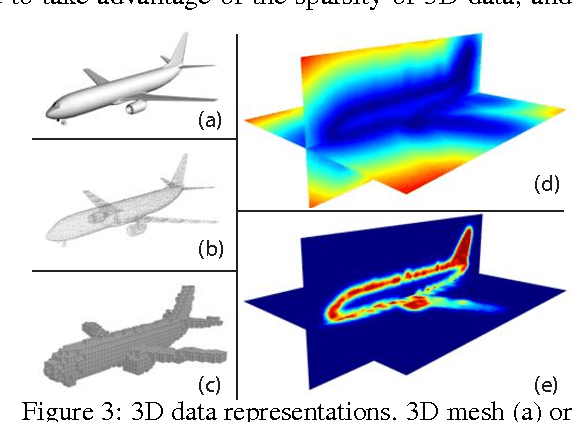
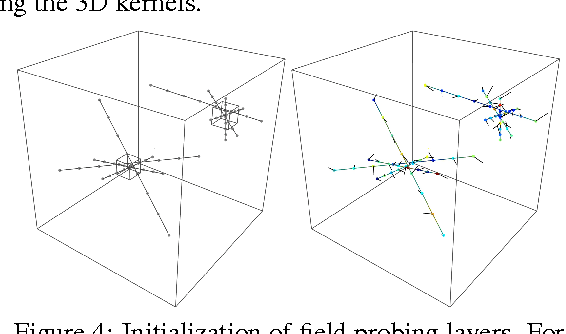
Building discriminative representations for 3D data has been an important task in computer graphics and computer vision research. Convolutional Neural Networks (CNNs) have shown to operate on 2D images with great success for a variety of tasks. Lifting convolution operators to 3D (3DCNNs) seems like a plausible and promising next step. Unfortunately, the computational complexity of 3D CNNs grows cubically with respect to voxel resolution. Moreover, since most 3D geometry representations are boundary based, occupied regions do not increase proportionately with the size of the discretization, resulting in wasted computation. In this work, we represent 3D spaces as volumetric fields, and propose a novel design that employs field probing filters to efficiently extract features from them. Each field probing filter is a set of probing points --- sensors that perceive the space. Our learning algorithm optimizes not only the weights associated with the probing points, but also their locations, which deforms the shape of the probing filters and adaptively distributes them in 3D space. The optimized probing points sense the 3D space "intelligently", rather than operating blindly over the entire domain. We show that field probing is significantly more efficient than 3DCNNs, while providing state-of-the-art performance, on classification tasks for 3D object recognition benchmark datasets.