 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow-guided Motion Prediction with Semantics and Dynamic Occupancy Grid Maps
Paper and Code
Jul 22, 2024
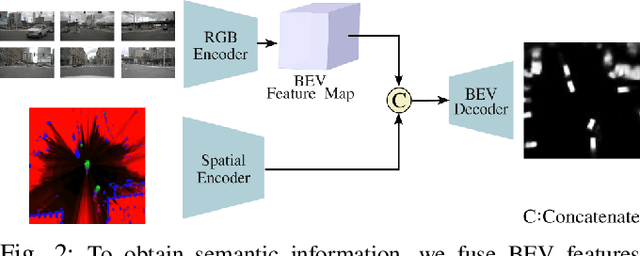


Accurate prediction of driving scenes is essential for road safety and autonomous driving. Occupancy Grid Maps (OGMs) are commonly employed for scene prediction due to their structured spatial representation, flexibility across sensor modalities and integration of uncertainty. Recent studies have successfully combined OGMs with deep learning methods to predict the evolution of scene and learn complex behaviours. These methods, however, do not consider prediction of flow or velocity vectors in the scene. In this work, we propose a novel multi-task framework that leverages dynamic OGMs and semantic information to predict both future vehicle semantic grids and the future flow of the scene. This incorporation of semantic flow not only offers intermediate scene features but also enables the generation of warped semantic grids. Evaluation on the real-world NuScenes dataset demonstrates improved prediction capabilities and enhanced ability of the model to retain dynamic vehicles within the scene.