 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Trinocular: Non-rigid Multi-Camera-IMU Dense Reconstruction for UAV Navigation and Mapping
Paper and Code
Aug 23, 2019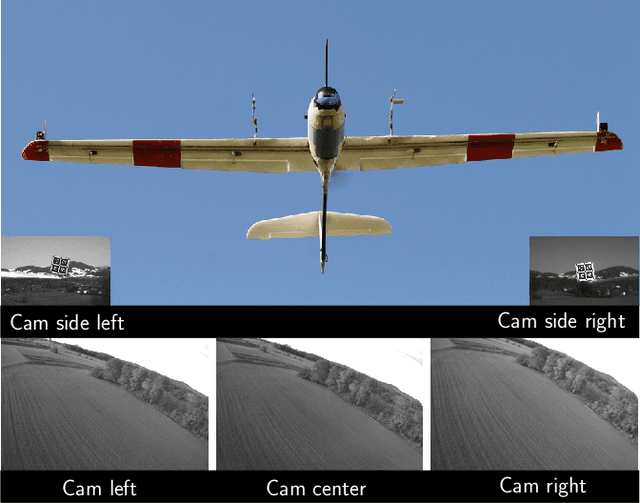
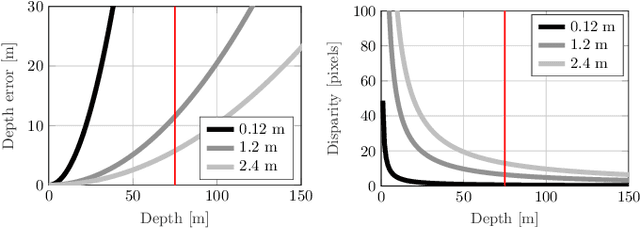
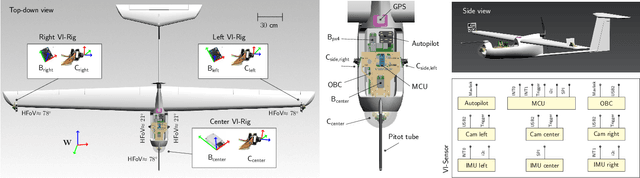
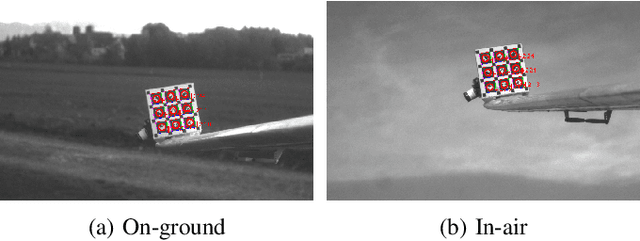
In this paper, we propose a visual-inertial framework able to efficiently estimate the camera poses of a non-rigid trinocular baseline for long-range depth estimation on-board a fast moving aerial platform. The estimation of the time-varying baseline is based on relative inertial measurements, a photometric relative pose optimizer, and a probabilistic wing model fused in an efficient Extended Kalman Filter (EKF) formulation. The estimated depth measurements can be integrated into a geo-referenced global map to render a reconstruction of the environment useful for local replanning algorithms. Based on extensive real-world experiments we describe the challenges and solutions for obtaining the probabilistic wing model, reliable relative inertial measurements, and vision-based relative pose updates and demonstrate the computational efficiency and robustness of the overall system under challenging conditions.