 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLAIR: Feeding via Long-horizon AcquIsition of Realistic dishes
Paper and Code
Jul 10, 2024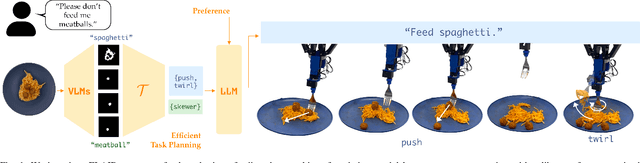



Robot-assisted feeding has the potential to improve the quality of life for individuals with mobility limitations who are unable to feed themselves independently. However, there exists a large gap between the homogeneous, curated plates existing feeding systems can handle, and truly in-the-wild meals. Feeding realistic plates is immensely challenging due to the sheer range of food items that a robot may encounter, each requiring specialized manipulation strategies which must be sequenced over a long horizon to feed an entire meal. An assistive feeding system should not only be able to sequence different strategies efficiently in order to feed an entire meal, but also be mindful of user preferences given the personalized nature of the task. We address this with FLAIR, a system for long-horizon feeding which leverages the commonsense and few-shot reasoning capabilities of foundation models, along with a library of parameterized skills, to plan and execute user-preferred and efficient bite sequences. In real-world evaluations across 6 realistic plates, we find that FLAIR can effectively tap into a varied library of skills for efficient food pickup, while adhering to the diverse preferences of 42 participants without mobility limitations as evaluated in a user study. We demonstrate the seamless integration of FLAIR with existing bite transfer methods [19, 28], and deploy it across 2 institutions and 3 robots, illustrating its adaptability. Finally, we illustrate the real-world efficacy of our system by successfully feeding a care recipient with severe mobility limitations. Supplementary materials and videos can be found at: https://emprise.cs.cornell.edu/flair .