 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLAF: Focal Line and Feature-constrained Active View Planning for Visual Teach and Repeat
Paper and Code
Sep 05, 2024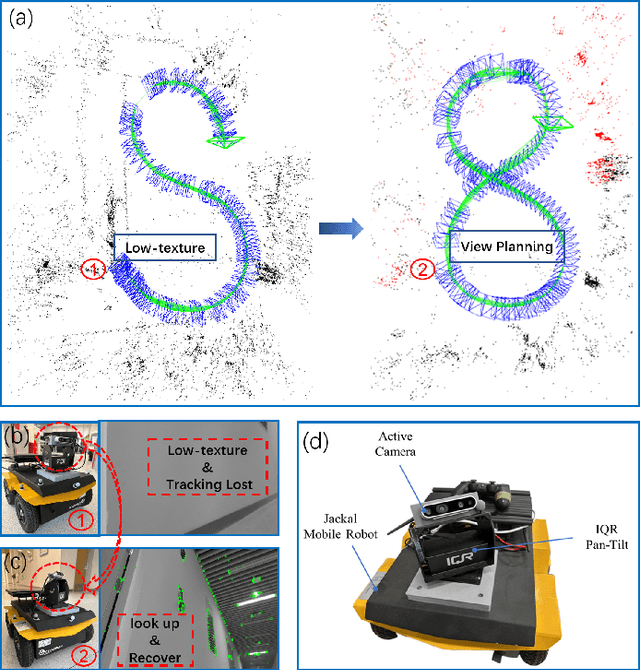
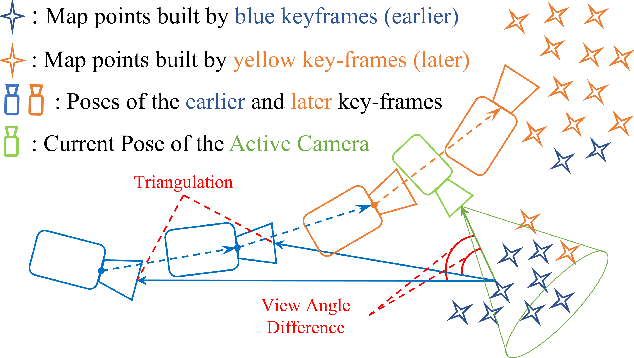
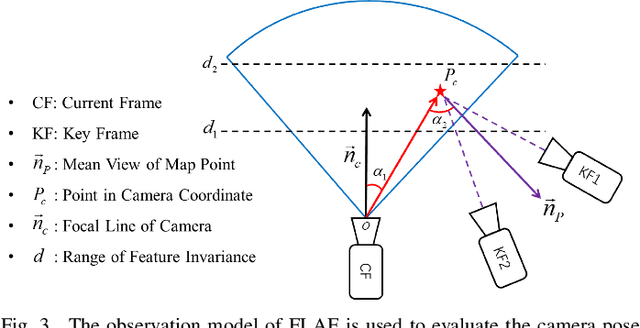
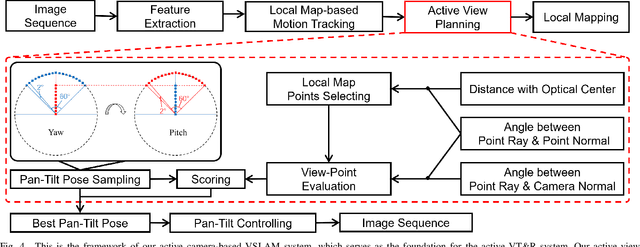
This paper presents FLAF, a focal line and feature-constrained active view planning method for tracking failure avoidance in feature-based visual navigation of mobile robots. Our FLAF-based visual navigation is built upon a feature-based visual teach and repeat (VT\&R) framework, which supports many robotic applications by teaching a robot to navigate on various paths that cover a significant portion of daily autonomous navigation requirements. However, tracking failure in feature-based visual simultaneous localization and mapping (VSLAM) caused by textureless regions in human-made environments is still limiting VT\&R to be adopted in the real world. To address this problem, the proposed view planner is integrated into a feature-based visual SLAM system to build up an active VT\&R system that avoids tracking failure. In our system, a pan-tilt unit (PTU)-based active camera is mounted on the mobile robot. Using FLAF, the active camera-based VSLAM operates during the teaching phase to construct a complete path map and in the repeat phase to maintain stable localization. FLAF orients the robot toward more map points to avoid mapping failures during path learning and toward more feature-identifiable map points beneficial for localization while following the learned trajectory. Experiments in real scenarios demonstrate that FLAF outperforms the methods that do not consider feature-identifiability, and our active VT\&R system performs well in complex environments by effectively dealing with low-texture regions.