 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Physical Adversarial Examples for Autonomous Driving with Fast and Differentiable Image Compositing
Paper and Code
Oct 17, 2020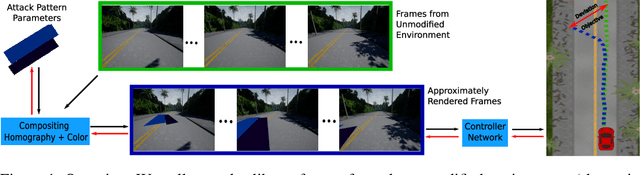
There is considerable evidence that deep neural networks are vulnerable to adversarial perturbations applied directly to their digital inputs. However, it remains an open question whether this translates to vulnerabilities in real-world systems. Specifically, in the context of image inputs to autonomous driving systems, an attack can be achieved only by modifying the physical environment, so as to ensure that the resulting stream of video inputs to the car's controller leads to incorrect driving decisions. Inducing this effect on the video inputs indirectly through the environment requires accounting for system dynamics and tracking viewpoint changes. We propose a scalable and efficient approach for finding adversarial physical modifications, using a differentiable approximation for the mapping from environmental modifications-namely, rectangles drawn on the road-to the corresponding video inputs to the controller network. Given the color, location, position, and orientation parameters of the rectangles, our mapping composites them onto pre-recorded video streams of the original environment. Our mapping accounts for geometric and color variations, is differentiable with respect to rectangle parameters, and uses multiple original video streams obtained by varying the driving trajectory. When combined with a neural network-based controller, our approach allows the design of adversarial modifications through end-to-end gradient-based optimization. We evaluate our approach using the Carla autonomous driving simulator, and show that it is significantly more scalable and far more effective at generating attacks than a prior black-box approach based on Bayesian Optimization.