 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFEND: A Future Enhanced Distribution-Aware Contrastive Learning Framework for Long-tail Trajectory Prediction
Paper and Code
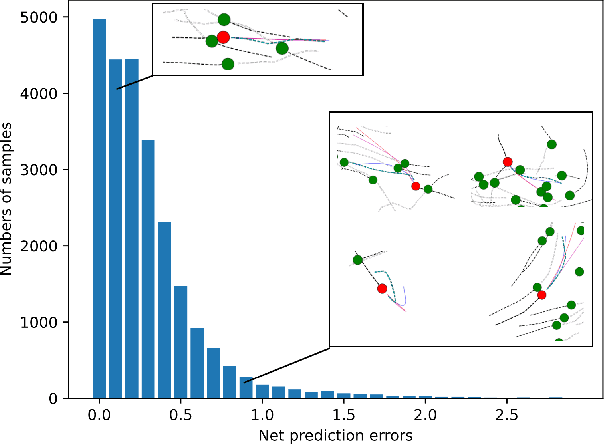



Predicting the future trajectories of the traffic agents is a gordian technique in autonomous driving. However, trajectory prediction suffers from data imbalance in the prevalent datasets, and the tailed data is often more complicated and safety-critical. In this paper, we focus on dealing with the long-tail phenomenon in trajectory prediction. Previous methods dealing with long-tail data did not take into account the variety of motion patterns in the tailed data. In this paper, we put forward a future enhanced contrastive learning framework to recognize tail trajectory patterns and form a feature space with separate pattern clusters. Furthermore, a distribution aware hyper predictor is brought up to better utilize the shaped feature space. Our method is a model-agnostic framework and can be plugged into many well-known baselines. Experimental results show that our framework outperforms the state-of-the-art long-tail prediction method on tailed samples by 9.5% on ADE and 8.5% on FDE, while maintaining or slightly improving the averaged performance. Our method also surpasses many long-tail techniques on trajectory prediction task.