 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFCFR-Net: Feature Fusion based Coarse-to-Fine Residual Learning for Monocular Depth Completion
Paper and Code
Dec 15, 2020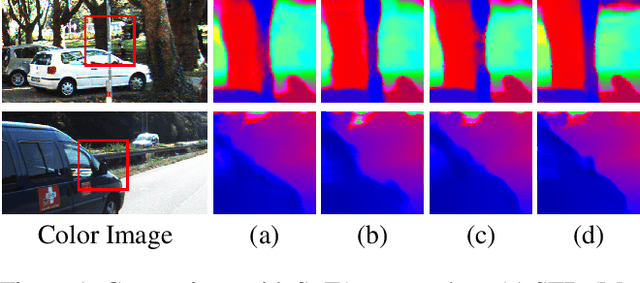

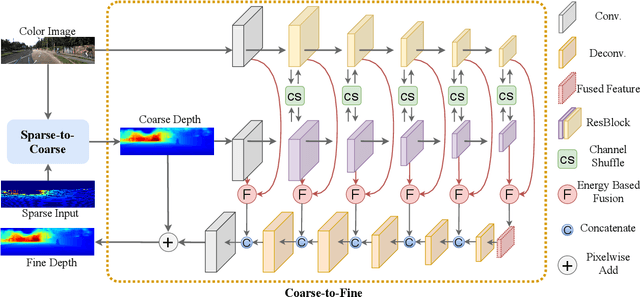

Depth completion aims to recover a dense depth map from a sparse depth map with the corresponding color image as input. Recent approaches mainly formulate the depth completion as a one-stage end-to-end learning task, which outputs dense depth maps directly. However, the feature extraction and supervision in one-stage frameworks are insufficient, limiting the performance of these approaches. To address this problem, we propose a novel end-to-end residual learning framework, which formulates the depth completion as a two-stage learning task, i.e., a sparse-to-coarse stage and a coarse-to-fine stage. First, a coarse dense depth map is obtained by a simple CNN framework. Then, a refined depth map is further obtained using a residual learning strategy in the coarse-to-fine stage with coarse depth map and color image as input. Specially, in the coarse-to-fine stage, a channel shuffle extraction operation is utilized to extract more representative features from color image and coarse depth map, and an energy based fusion operation is exploited to effectively fuse these features obtained by channel shuffle operation, thus leading to more accurate and refined depth maps. We achieve SoTA performance in RMSE on KITTI benchmark. Extensive experiments on other datasets future demonstrate the superiority of our approach over current state-of-the-art depth completion approaches.