 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Region Proposal Learning for Object Detection for Robotics
Paper and Code
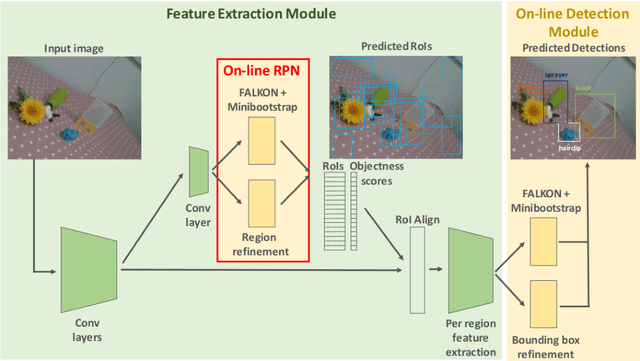
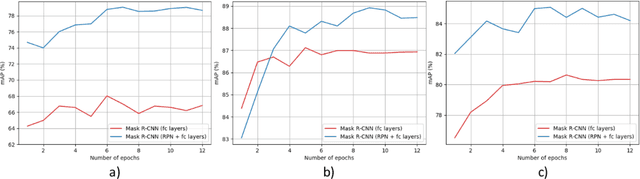
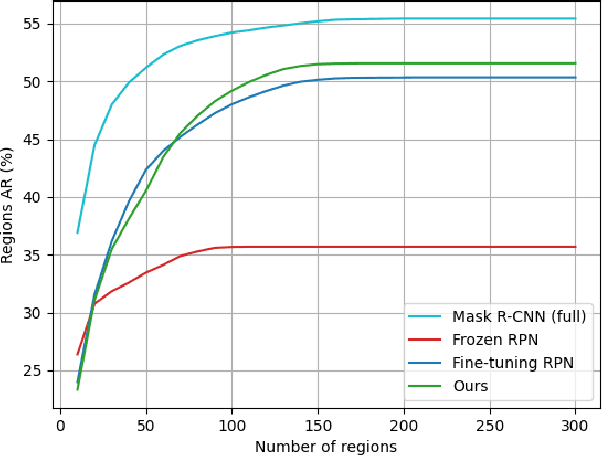
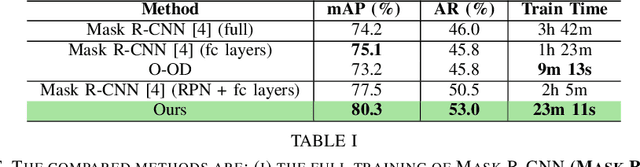
Object detection is a fundamental task for robots to operate in unstructured environments. Today, there are several deep learning algorithms that solve this task with remarkable performance. Unfortunately, training such systems requires several hours of GPU time. For robots, to successfully adapt to changes in the environment or learning new objects, it is also important that object detectors can be re-trained in a short amount of time. A recent method [1] proposes an architecture that leverages on the powerful representation of deep learning descriptors, while permitting fast adaptation time. Leveraging on the natural decomposition of the task in (i) regions candidate generation, (ii) feature extraction and (iii) regions classification, this method performs fast adaptation of the detector, by only re-training the classification layer. This shortens training time while maintaining state-of-the-art performance. In this paper, we firstly demonstrate that a further boost in accuracy can be obtained by adapting, in addition, the regions candidate generation on the task at hand. Secondly, we extend the object detection system presented in [1] with the proposed fast learning approach, showing experimental evidence on the improvement provided in terms of speed and accuracy on two different robotics datasets. The code to reproduce the experiments is publicly available on GitHub.