 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Efficient Locomotion via Learned Gait Transitions
Paper and Code
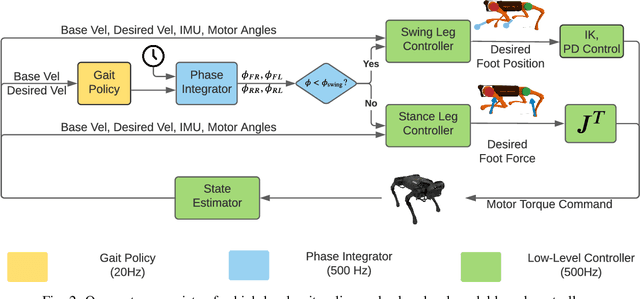
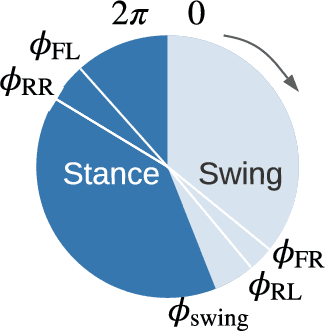
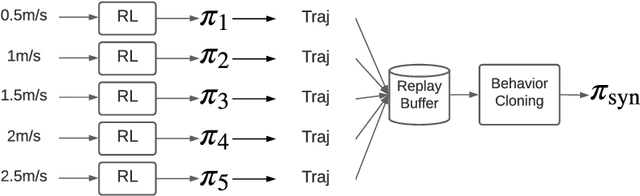
We focus on the problem of developing efficient controllers for quadrupedal robots. Animals can actively switch gaits at different speeds to lower their energy consumption. In this paper, we devise a hierarchical learning framework, in which distinctive locomotion gaits and natural gait transitions emerge automatically with a simple reward of energy minimization. We use reinforcement learning to train a high-level gait policy that specifies the contact schedules of each foot, while the low-level Model Predictive Controller (MPC) optimizes the motor torques so that the robot can walk at a desired velocity using that gait pattern. We test our learning framework on a quadruped robot and demonstrate automatic gait transitions, from walking to trotting and to fly-trotting, as the robot increases its speed up to 2.5m/s (5 body lengths/s). We show that the learned hierarchical controller consumes much less energy across a wide range of locomotion speed than baseline controllers.