 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFARSEC: A Reproducible Framework for Automatic Real-Time Vehicle Speed Estimation Using Traffic Cameras
Paper and Code
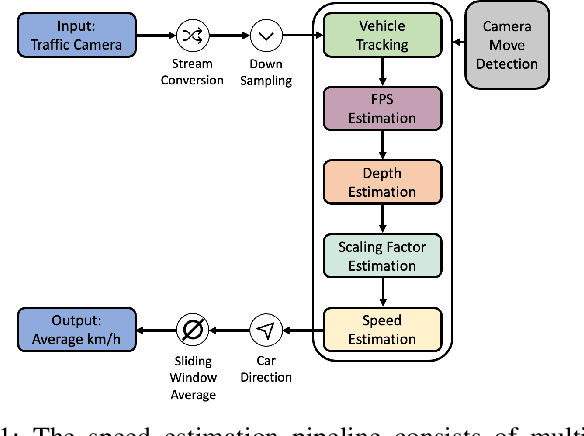
Estimating the speed of vehicles using traffic cameras is a crucial task for traffic surveillance and management, enabling more optimal traffic flow, improved road safety, and lower environmental impact. Transportation-dependent systems, such as for navigation and logistics, have great potential to benefit from reliable speed estimation. While there is prior research in this area reporting competitive accuracy levels, their solutions lack reproducibility and robustness across different datasets. To address this, we provide a novel framework for automatic real-time vehicle speed calculation, which copes with more diverse data from publicly available traffic cameras to achieve greater robustness. Our model employs novel techniques to estimate the length of road segments via depth map prediction. Additionally, our framework is capable of handling realistic conditions such as camera movements and different video stream inputs automatically. We compare our model to three well-known models in the field using their benchmark datasets. While our model does not set a new state of the art regarding prediction performance, the results are competitive on realistic CCTV videos. At the same time, our end-to-end pipeline offers more consistent results, an easier implementation, and better compatibility. Its modular structure facilitates reproducibility and future improvements.