 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAEP: Fast Autonomous Exploration Planner for UAV Equipped with Limited FOV Sensor
Paper and Code
Feb 25, 2022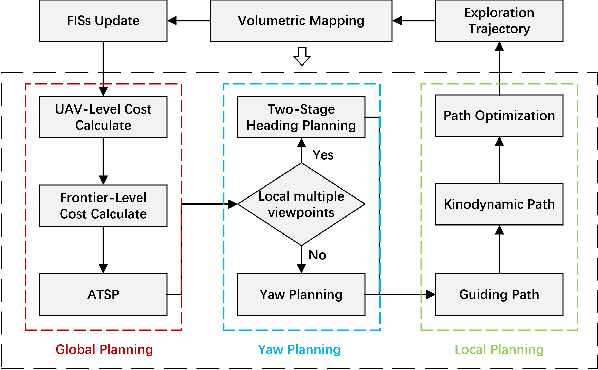
Autonomous exploration is one of the important parts to achieve the autonomous operation of Unmanned Aerial Vehicles (UAVs). To improve the efficiency of the exploration process, a fast and autonomous exploration planner (FAEP) is proposed in this paper. We firstly design a novel frontiers exploration sequence generation method to obtain a more reasonable exploration path, which considers not only the flight-level but frontier-level factors into TSP. According to the exploration sequence and the distribution of frontiers, a two-stage heading planning strategy is proposed to cover more frontiers by heading change during an exploration journey. To improve the stability of path searching, a guided kinodynamic path searching based on a guiding path is devised. In addition, a dynamic start point selection method for replanning is also adopted to increase the fluency of flight. We present sufficient benchmark and real-world experiments. Experimental results show the superiority of the proposed exploration planner compared with typical and state-of-the-art methods.