 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Social Motion Latent Space and Human Awareness for Effective Robot Navigation in Crowded Environments
Paper and Code
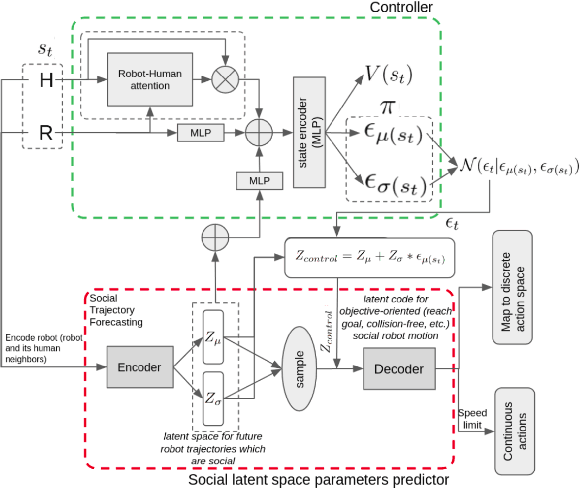
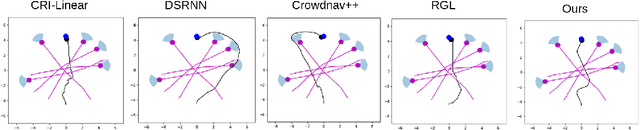
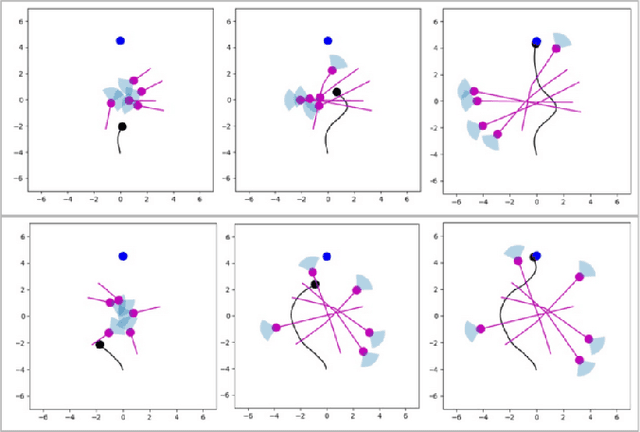
This work proposes a novel approach to social robot navigation by learning to generate robot controls from a social motion latent space. By leveraging this social motion latent space, the proposed method achieves significant improvements in social navigation metrics such as success rate, navigation time, and trajectory length while producing smoother (less jerk and angular deviations) and more anticipatory trajectories. The superiority of the proposed method is demonstrated through comparison with baseline models in various scenarios. Additionally, the concept of humans' awareness towards the robot is introduced into the social robot navigation framework, showing that incorporating human awareness leads to shorter and smoother trajectories owing to humans' ability to positively interact with the robot.