 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring contextual modeling with linear complexity for point cloud segmentation
Paper and Code

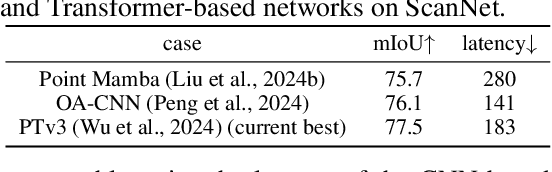


Point cloud segmentation is an important topic in 3D understanding that has traditionally has been tackled using either the CNN or Transformer. Recently, Mamba has emerged as a promising alternative, offering efficient long-range contextual modeling capabilities without the quadratic complexity associated with Transformer's attention mechanisms. However, despite Mamba's potential, early efforts have all failed to achieve better performance than the best CNN-based and Transformer-based methods. In this work, we address this challenge by identifying the key components of an effective and efficient point cloud segmentation architecture. Specifically, we show that: 1) Spatial locality and robust contextual understanding are critical for strong performance, and 2) Mamba features linear computational complexity, offering superior data and inference efficiency compared to Transformers, while still being capable of delivering strong contextual understanding. Additionally, we further enhance the standard Mamba specifically for point cloud segmentation by identifying its two key shortcomings. First, the enforced causality in the original Mamba is unsuitable for processing point clouds that have no such dependencies. Second, its unidirectional scanning strategy imposes a directional bias, hampering its ability to capture the full context of unordered point clouds in a single pass. To address these issues, we carefully remove the causal convolutions and introduce a novel Strided Bidirectional SSM to enhance the model's capability to capture spatial relationships. Our efforts culminate in the development of a novel architecture named MEEPO, which effectively integrates the strengths of CNN and Mamba. MEEPO surpasses the previous state-of-the-art method, PTv3, by up to +0.8 mIoU on multiple key benchmark datasets, while being 42.1% faster and 5.53x more memory efficient.