 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Correspondences with All-pairs Correlations for Multi-view Depth Estimation
Paper and Code
May 05, 2022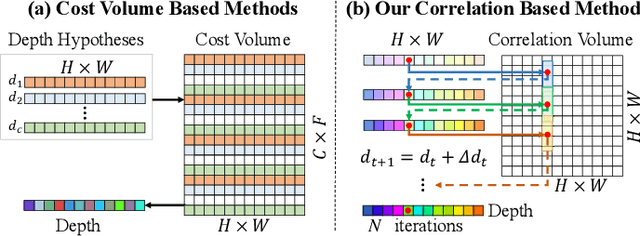
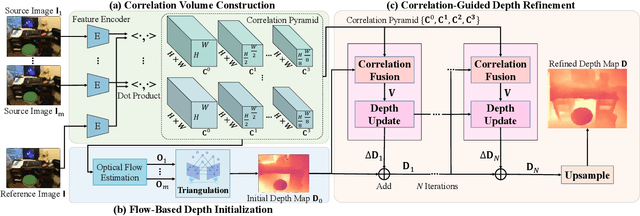
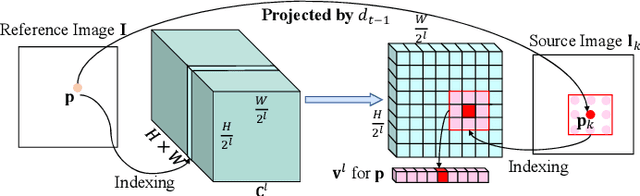
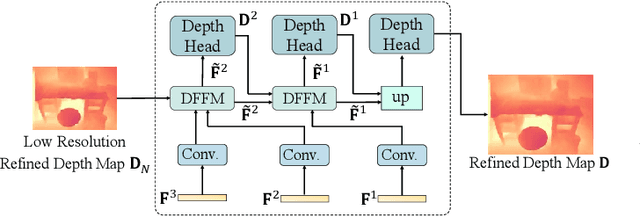
Multi-view depth estimation plays a critical role in reconstructing and understanding the 3D world. Recent learning-based methods have made significant progress in it. However, multi-view depth estimation is fundamentally a correspondence-based optimization problem, but previous learning-based methods mainly rely on predefined depth hypotheses to build correspondence as the cost volume and implicitly regularize it to fit depth prediction, deviating from the essence of iterative optimization based on stereo correspondence. Thus, they suffer unsatisfactory precision and generalization capability. In this paper, we are the first to explore more general image correlations to establish correspondences dynamically for depth estimation. We design a novel iterative multi-view depth estimation framework mimicking the optimization process, which consists of 1) a correlation volume construction module that models the pixel similarity between a reference image and source images as all-to-all correlations; 2) a flow-based depth initialization module that estimates the depth from the 2D optical flow; 3) a novel correlation-guided depth refinement module that reprojects points in different views to effectively fetch relevant correlations for further fusion and integrate the fused correlation for iterative depth update. Without predefined depth hypotheses, the fused correlations establish multi-view correspondence in an efficient way and guide the depth refinement heuristically. We conduct sufficient experiments on ScanNet, DeMoN, ETH3D, and 7Scenes to demonstrate the superiority of our method on multi-view depth estimation and its best generalization ability.