Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Evaluation of 3D-LIDAR Camera Extrinsic Calibration
Paper and Code
Jul 03, 2020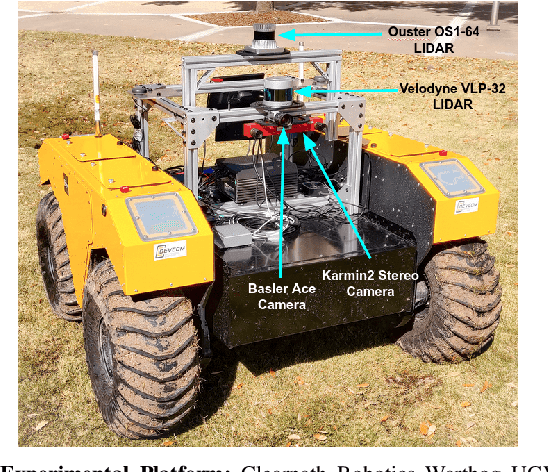
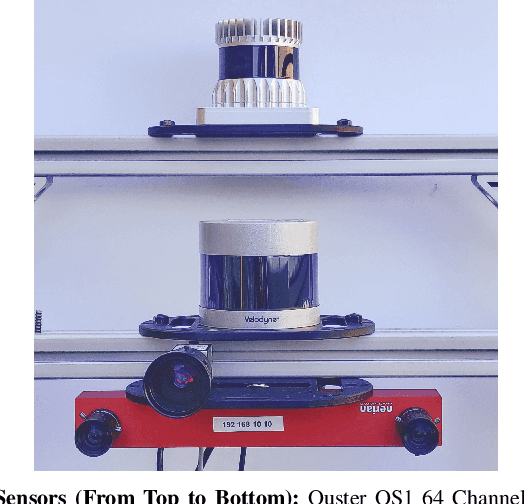
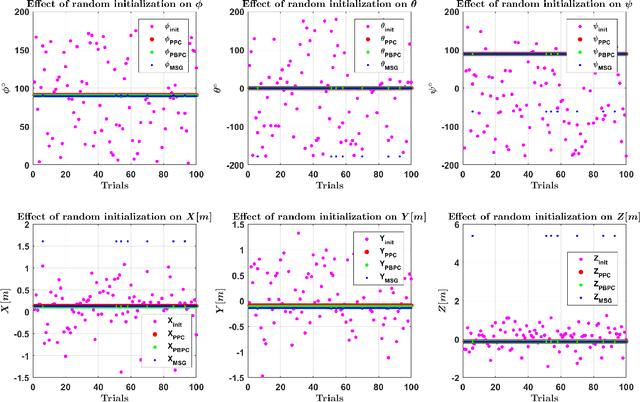
In this paper we perform an experimental comparison of three different target based 3D-LIDAR camera calibration algorithms. We briefly elucidate the mathematical background behind each method and provide insights into practical aspects like ease of data collection for all of them. We extensively evaluate these algorithms on a sensor suite which consists multiple cameras and LIDARs by assessing their robustness to random initialization and by using metrics like Mean Line Re-projection Error (MLRE) and Factory Stereo Calibration Error. We also show the effect of noisy sensor on the calibration result from all the algorithms and conclude with a note on which calibration algorithm should be used under what circumstances.
* Accepted at the IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), October 25-29, 2020 | Las Vegas, NV, USA
View paper on