 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVI-SAM: Robust, Real-time, Tightly-coupled Event-Visual-Inertial State Estimation and 3D Dense Mapping
Paper and Code
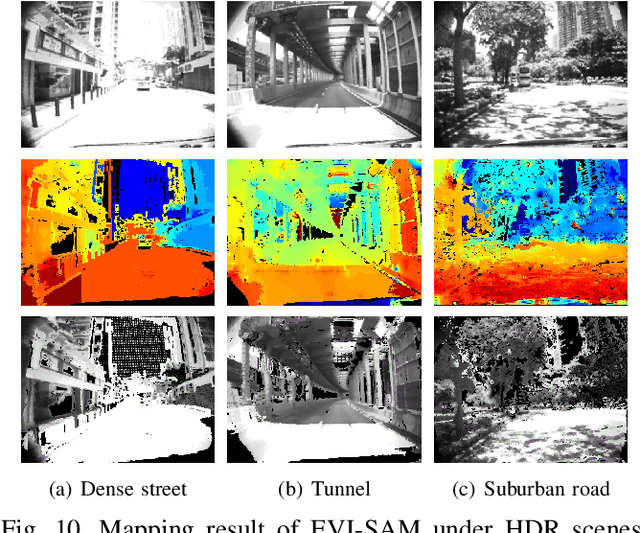
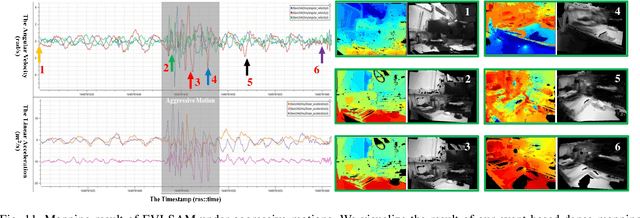
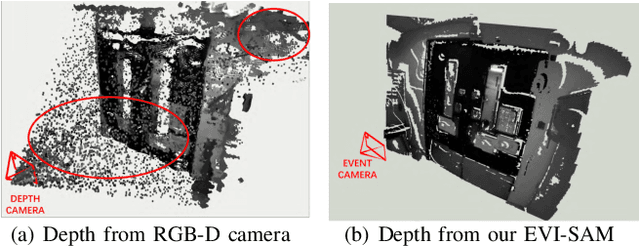
Event cameras are bio-inspired, motion-activated sensors that demonstrate substantial potential in handling challenging situations, such as motion blur and high-dynamic range. In this paper, we proposed EVI-SAM to tackle the problem of 6 DoF pose tracking and 3D reconstruction using monocular event camera. A novel event-based hybrid tracking framework is designed to estimate the pose, leveraging the robustness of feature matching and the precision of direct alignment. Specifically, we develop an event-based 2D-2D alignment to construct the photometric constraint, and tightly integrate it with the event-based reprojection constraint. The mapping module recovers the dense and colorful depth of the scene through the image-guided event-based mapping method. Subsequently, the appearance, texture, and surface mesh of the 3D scene can be reconstructed by fusing the dense depth map from multiple viewpoints using truncated signed distance function (TSDF) fusion. To the best of our knowledge, this is the first non-learning work to realize event-based dense mapping. Numerical evaluations are performed on both publicly available and self-collected datasets, which qualitatively and quantitatively demonstrate the superior performance of our method. Our EVI-SAM effectively balances accuracy and robustness while maintaining computational efficiency, showcasing superior pose tracking and dense mapping performance in challenging scenarios. Video Demo: https://youtu.be/Nn40U4e5Si8.