 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Nonlinear Dynamics with the ConvNet Smoother
Paper and Code
Apr 21, 2017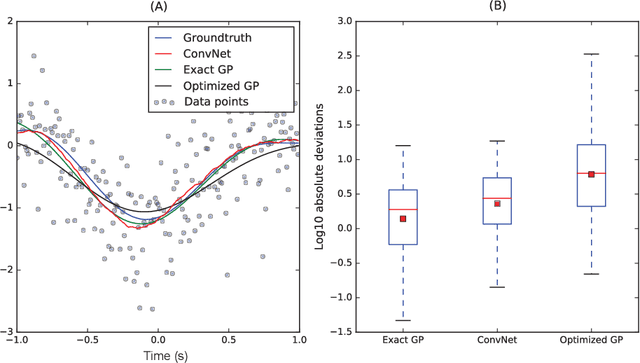
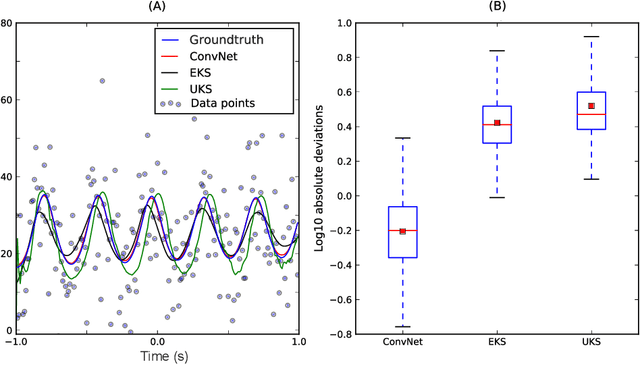
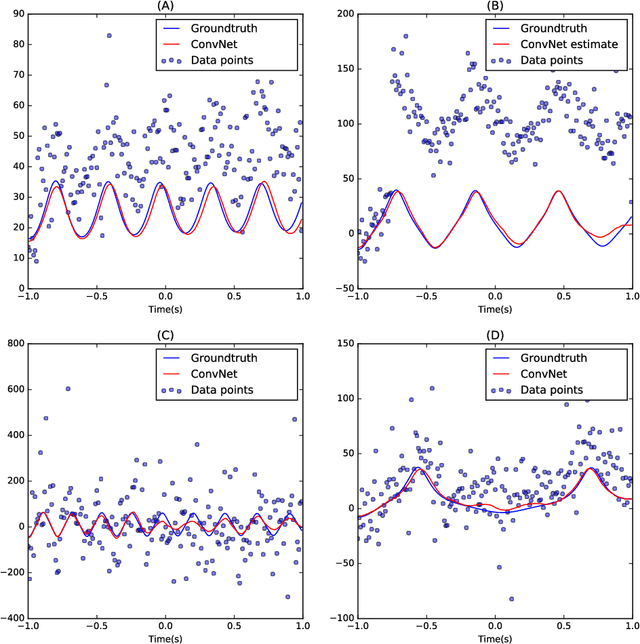
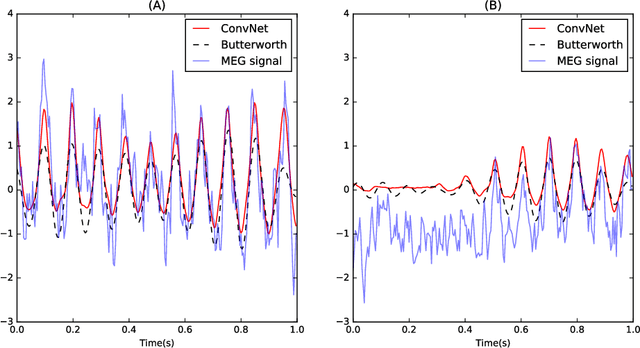
Estimating the state of a dynamical system from a series of noise-corrupted observations is fundamental in many areas of science and engineering. The most well-known method, the Kalman smoother (and the related Kalman filter), relies on assumptions of linearity and Gaussianity that are rarely met in practice. In this paper, we introduced a new dynamical smoothing method that exploits the remarkable capabilities of convolutional neural networks to approximate complex non-linear functions. The main idea is to generate a training set composed of both latent states and observations from an ensemble of simulators and to train the deep network to recover the former from the latter. Importantly, this method only requires the availability of the simulators and can therefore be applied in situations in which either the latent dynamical model or the observation model cannot be easily expressed in closed form. In our simulation studies, we show that the resulting ConvNet smoother has almost optimal performance in the Gaussian case even when the parameters are unknown. Furthermore, the method can be successfully applied to extremely non-linear and non-Gaussian systems. Finally, we empirically validate our approach via the analysis of measured brain signals.