 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeError Controlled Actor-Critic
Paper and Code
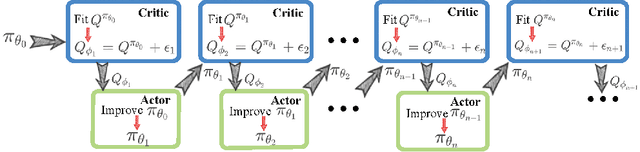
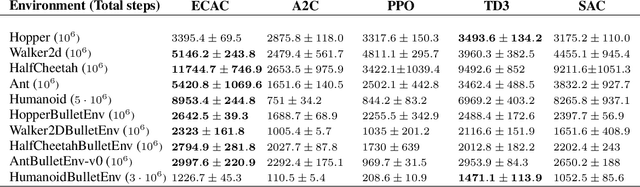
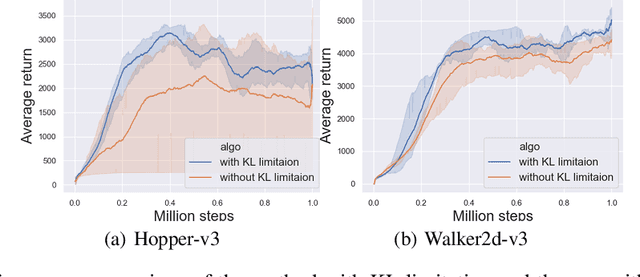
On error of value function inevitably causes an overestimation phenomenon and has a negative impact on the convergence of the algorithms. To mitigate the negative effects of the approximation error, we propose Error Controlled Actor-critic which ensures confining the approximation error in value function. We present an analysis of how the approximation error can hinder the optimization process of actor-critic methods.Then, we derive an upper boundary of the approximation error of Q function approximator and find that the error can be lowered by restricting on the KL-divergence between every two consecutive policies when training the policy. The results of experiments on a range of continuous control tasks demonstrate that the proposed actor-critic algorithm apparently reduces the approximation error and significantly outperforms other model-free RL algorithms.