 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquivariant Multi-View Networks
Paper and Code
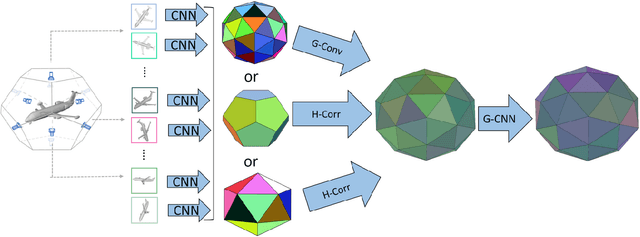
Several approaches to 3D vision tasks process multiple views of the input independently with deep neural networks pre-trained on natural images, achieving view permutation invariance through a single round of pooling over all views. We argue that this operation discards important information and leads to subpar global descriptors. In this paper, we propose a group convolutional approach to multiple view aggregation where convolutions are performed over a discrete subgroup of the rotation group, enabling, thus, joint reasoning over all views in an equivariant (instead of invariant) fashion, up to the very last layer. We further develop this idea to operate on smaller discrete homogeneous spaces of the rotation group, where a polar view representation is used to maintain equivariance with only a fraction of the number of input views. We set the new state of the art in several large scale 3D shape retrieval tasks, and show additional applications to panoramic scene classification.