 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Mapless Trajectory Prediction through Knowledge Distillation
Paper and Code


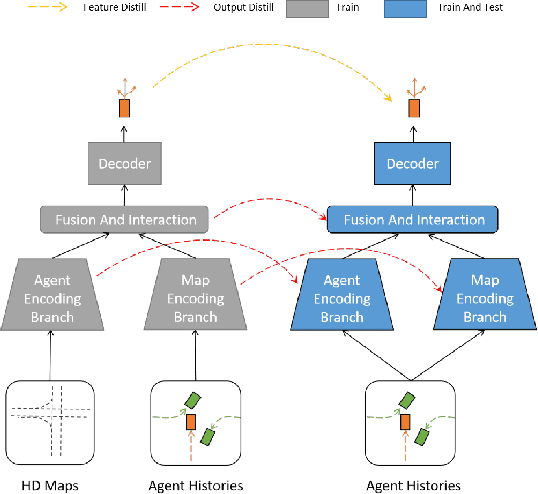

Scene information plays a crucial role in trajectory forecasting systems for autonomous driving by providing semantic clues and constraints on potential future paths of traffic agents. Prevalent trajectory prediction techniques often take high-definition maps (HD maps) as part of the inputs to provide scene knowledge. Although HD maps offer accurate road information, they may suffer from the high cost of annotation or restrictions of law that limits their widespread use. Therefore, those methods are still expected to generate reliable prediction results in mapless scenarios. In this paper, we tackle the problem of improving the consistency of multi-modal prediction trajectories and the real road topology when map information is unavailable during the test phase. Specifically, we achieve this by training a map-based prediction teacher network on the annotated samples and transferring the knowledge to a student mapless prediction network using a two-fold knowledge distillation framework. Our solution is generalizable for common trajectory prediction networks and does not bring extra computation burden. Experimental results show that our method stably improves prediction performance in mapless mode on many widely used state-of-the-art trajectory prediction baselines, compensating for the gaps caused by the absence of HD maps. Qualitative visualization results demonstrate that our approach helps infer unseen map information.