 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Interactive Prediction and Planning with Optical Flow Distillation for Autonomous Driving
Paper and Code
Apr 18, 2021
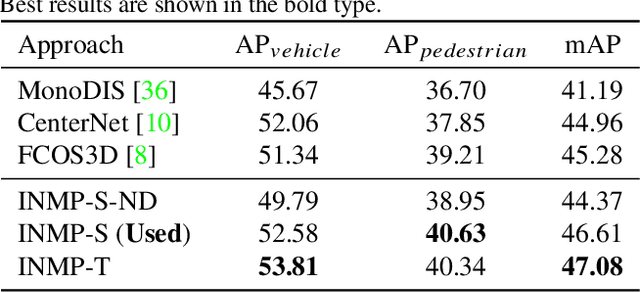
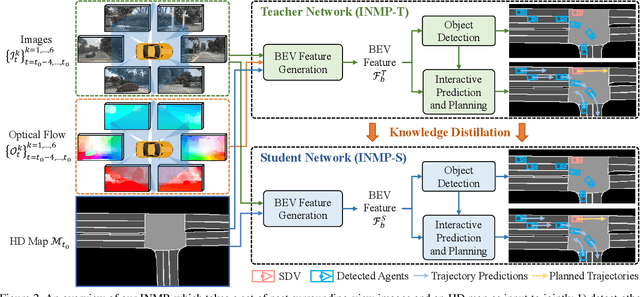
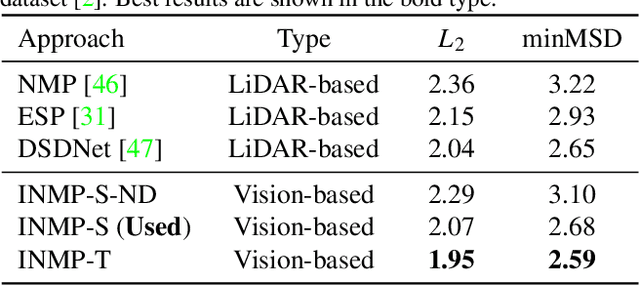
With the recent advancement of deep learning technology, data-driven approaches for autonomous car prediction and planning have achieved extraordinary performance. Nevertheless, most of these approaches follow a non-interactive prediction and planning paradigm, hypothesizing that a vehicle's behaviors do not affect others. The approaches based on such a non-interactive philosophy typically perform acceptably in sparse traffic scenarios but can easily fail in dense traffic scenarios. Therefore, we propose an end-to-end interactive neural motion planner (INMP) for autonomous driving in this paper. Given a set of past surrounding-view images and a high definition map, our INMP first generates a feature map in bird's-eye-view space, which is then processed to detect other agents and perform interactive prediction and planning jointly. Also, we adopt an optical flow distillation paradigm, which can effectively improve the network performance while still maintaining its real-time inference speed. Extensive experiments on the nuScenes dataset and in the closed-loop Carla simulation environment demonstrate the effectiveness and efficiency of our INMP for the detection, prediction, and planning tasks. Our project page is at sites.google.com/view/inmp-ofd.