 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Basic Normative HRI in a Cognitive Robotic Architecture
Paper and Code
Feb 11, 2016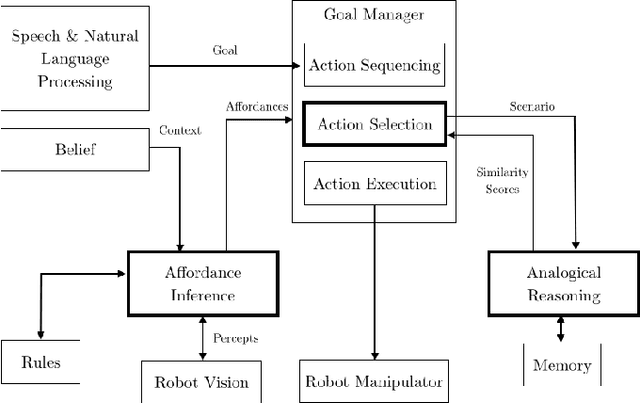
Collaborative human activities are grounded in social and moral norms, which humans consciously and subconsciously use to guide and constrain their decision-making and behavior, thereby strengthening their interactions and preventing emotional and physical harm. This type of norm-based processing is also critical for robots in many human-robot interaction scenarios (e.g., when helping elderly and disabled persons in assisted living facilities, or assisting humans in assembly tasks in factories or even the space station). In this position paper, we will briefly describe how several components in an integrated cognitive architecture can be used to implement processes that are required for normative human-robot interactions, especially in collaborative tasks where actions and situations could potentially be perceived as threatening and thus need a change in course of action to mitigate the perceived threats.