 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEllipse R-CNN: Learning to Infer Elliptical Object from Clustering and Occlusion
Paper and Code
Jan 30, 2020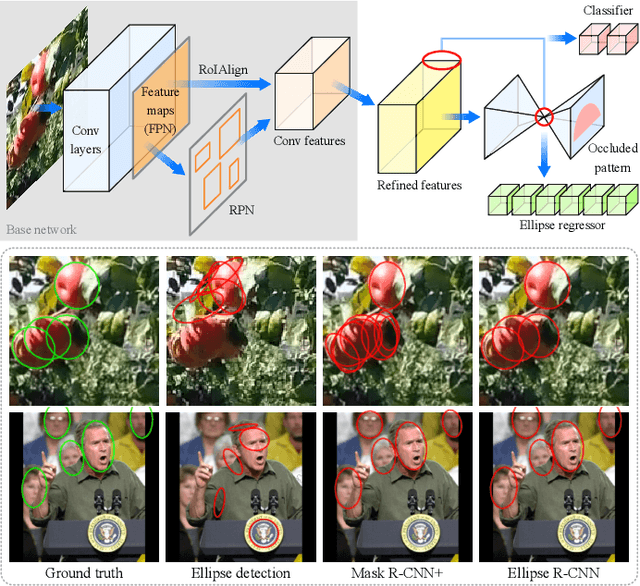
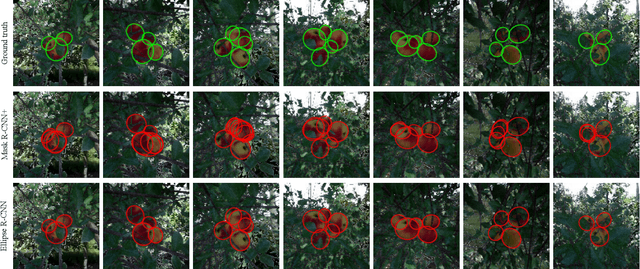


Images of heavily occluded objects in cluttered scenes, such as fruit clusters in trees, are hard to segment. To further retrieve the 3D size and 6D pose of each individual object in such cases, bounding boxes are not reliable from multiple views since only a little portion of the object's geometry is captured. We introduce the first CNN-based ellipse detector, called Ellipse R-CNN, to represent and infer occluded objects as ellipses. We first propose a robust and compact ellipse regression based on the Mask R-CNN architecture for elliptical object detection. Our method can infer the parameters of multiple elliptical objects even they are occluded by other neighboring objects. For better occlusion handling, we exploit refined feature regions for the regression stage, and integrate the U-Net structure for learning different occlusion patterns to compute the final detection score. The correctness of ellipse regression is validated through experiments performed on synthetic data of clustered ellipses. We further quantitatively and qualitatively demonstrate that our approach outperforms the state-of-the-art model (i.e., Mask R-CNN followed by ellipse fitting) and its three variants on both synthetic and real datasets of occluded and clustered elliptical objects.