 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElements of Effective Deep Reinforcement Learning towards Tactical Driving Decision Making
Paper and Code
Feb 01, 2018
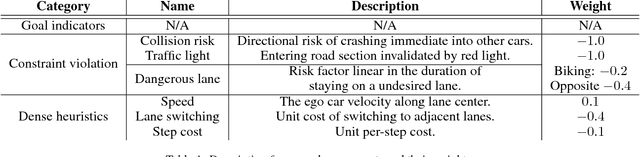


Tactical driving decision making is crucial for autonomous driving systems and has attracted considerable interest in recent years. In this paper, we propose several practical components that can speed up deep reinforcement learning algorithms towards tactical decision making tasks: 1) non-uniform action skipping as a more stable alternative to action-repetition frame skipping, 2) a counter-based penalty for lanes on which ego vehicle has less right-of-road, and 3) heuristic inference-time action masking for apparently undesirable actions. We evaluate the proposed components in a realistic driving simulator and compare them with several baselines. Results show that the proposed scheme provides superior performance in terms of safety, efficiency, and comfort.