 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Generation of Motion Plans from Attribute-Based Natural Language Instructions Using Dynamic Constraint Mapping
Paper and Code
Oct 15, 2018
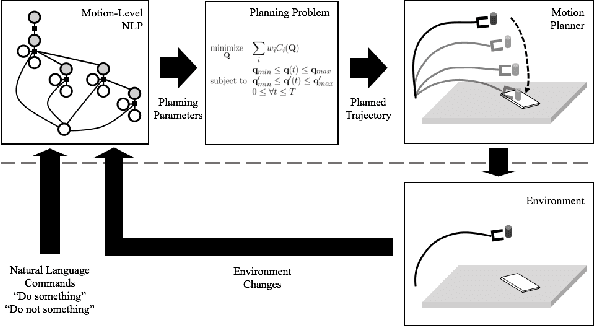
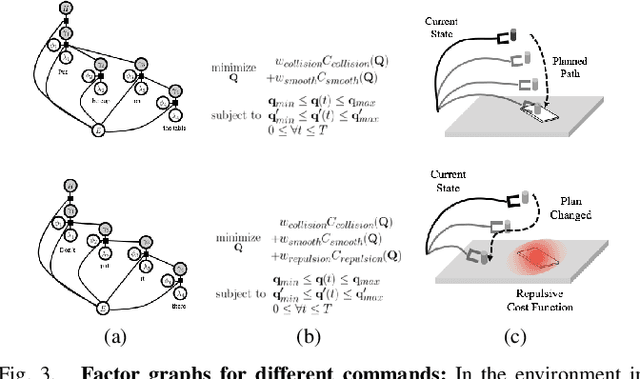
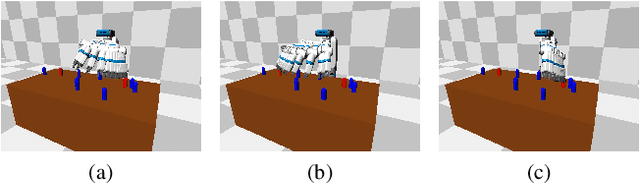
We present an algorithm for combining natural language processing (NLP) and fast robot motion planning to automatically generate robot movements. Our formulation uses a novel concept called Dynamic Constraint Mapping to transform complex, attribute-based natural language instructions into appropriate cost functions and parametric constraints for optimization-based motion planning. We generate a factor graph from natural language instructions called the Dynamic Grounding Graph (DGG), which takes latent parameters into account. The coefficients of this factor graph are learned based on conditional random fields (CRFs) and are used to dynamically generate the constraints for motion planning. We map the cost function directly to the motion parameters of the planner and compute smooth trajectories in dynamic scenes. We highlight the performance of our approach in a simulated environment and via a human interacting with a 7-DOF Fetch robot using intricate language commands including negation, orientation specification, and distance constraints.