 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEarly Detection of Human Handover Intentions in Human-Robot Collaboration: Comparing EEG, Gaze, and Hand Motion
Paper and Code
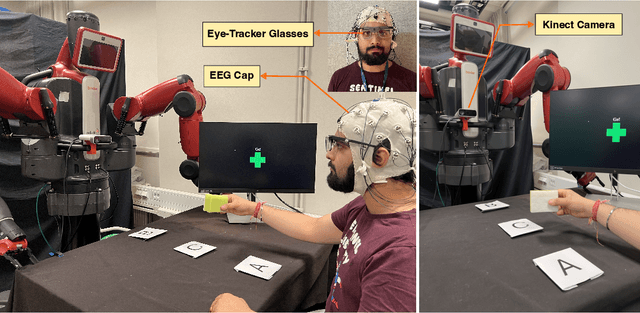
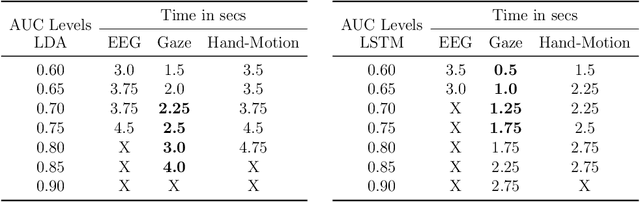
Human-robot collaboration (HRC) relies on accurate and timely recognition of human intentions to ensure seamless interactions. Among common HRC tasks, human-to-robot object handovers have been studied extensively for planning the robot's actions during object reception, assuming the human intention for object handover. However, distinguishing handover intentions from other actions has received limited attention. Most research on handovers has focused on visually detecting motion trajectories, which often results in delays or false detections when trajectories overlap. This paper investigates whether human intentions for object handovers are reflected in non-movement-based physiological signals. We conduct a multimodal analysis comparing three data modalities: electroencephalogram (EEG), gaze, and hand-motion signals. Our study aims to distinguish between handover-intended human motions and non-handover motions in an HRC setting, evaluating each modality's performance in predicting and classifying these actions before and after human movement initiation. We develop and evaluate human intention detectors based on these modalities, comparing their accuracy and timing in identifying handover intentions. To the best of our knowledge, this is the first study to systematically develop and test intention detectors across multiple modalities within the same experimental context of human-robot handovers. Our analysis reveals that handover intention can be detected from all three modalities. Nevertheless, gaze signals are the earliest as well as the most accurate to classify the motion as intended for handover or non-handover.