 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynaSurfGS: Dynamic Surface Reconstruction with Planar-based Gaussian Splatting
Paper and Code
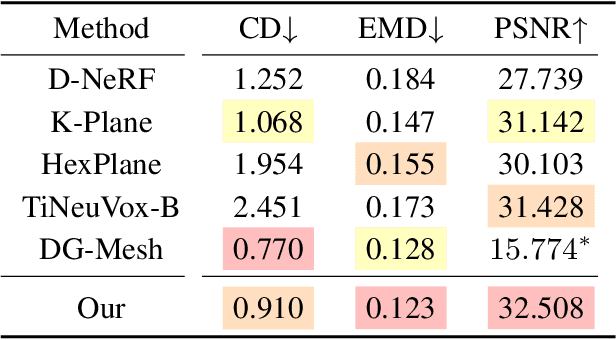
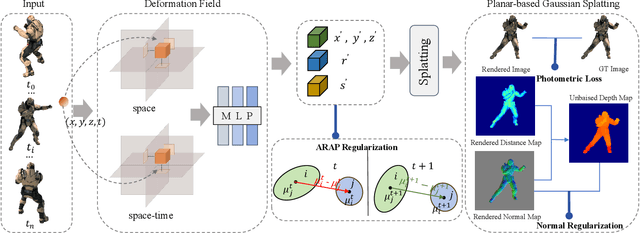
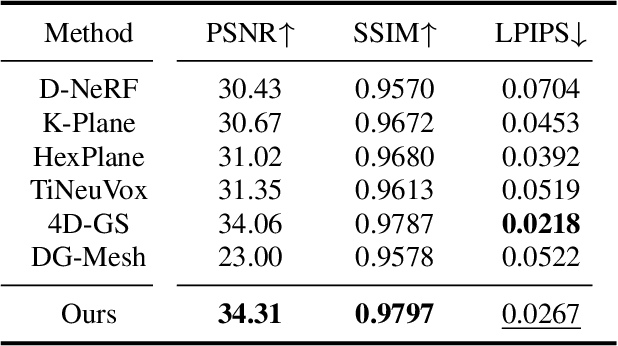
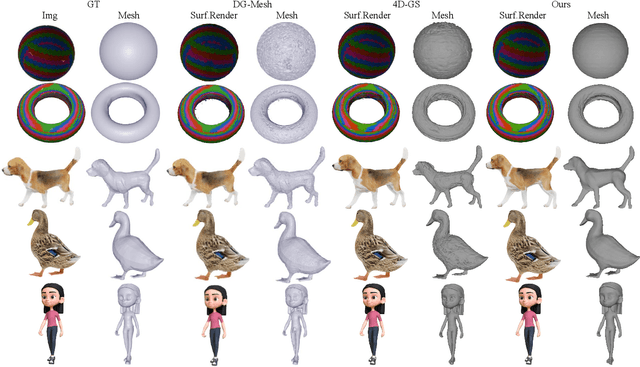
Dynamic scene reconstruction has garnered significant attention in recent years due to its capabilities in high-quality and real-time rendering. Among various methodologies, constructing a 4D spatial-temporal representation, such as 4D-GS, has gained popularity for its high-quality rendered images. However, these methods often produce suboptimal surfaces, as the discrete 3D Gaussian point clouds fail to align with the object's surface precisely. To address this problem, we propose DynaSurfGS to achieve both photorealistic rendering and high-fidelity surface reconstruction of dynamic scenarios. Specifically, the DynaSurfGS framework first incorporates Gaussian features from 4D neural voxels with the planar-based Gaussian Splatting to facilitate precise surface reconstruction. It leverages normal regularization to enforce the smoothness of the surface of dynamic objects. It also incorporates the as-rigid-as-possible (ARAP) constraint to maintain the approximate rigidity of local neighborhoods of 3D Gaussians between timesteps and ensure that adjacent 3D Gaussians remain closely aligned throughout. Extensive experiments demonstrate that DynaSurfGS surpasses state-of-the-art methods in both high-fidelity surface reconstruction and photorealistic rendering.