Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamicFilter: an Online Dynamic Objects Removal Framework for Highly Dynamic Environments
Paper and Code
Jun 30, 2022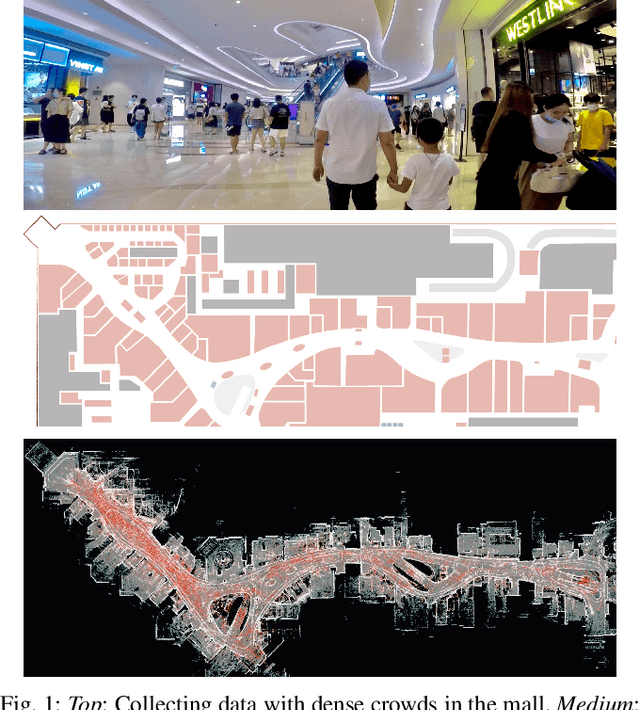
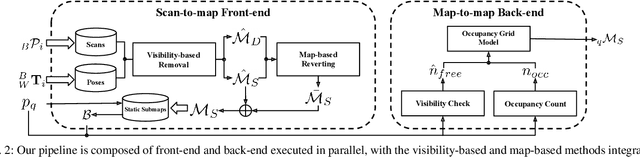
Emergence of massive dynamic objects will diversify spatial structures when robots navigate in urban environments. Therefore, the online removal of dynamic objects is critical. In this paper, we introduce a novel online removal framework for highly dynamic urban environments. The framework consists of the scan-to-map front-end and the map-to-map back-end modules. Both the front- and back-ends deeply integrate the visibility-based approach and map-based approach. The experiments validate the framework in highly dynamic simulation scenarios and real-world datasets.
* ICRA 2022
View paper on