 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Ensemble Modeling Approach to Nonstationary Neural Decoding in Brain-Computer Interfaces
Paper and Code



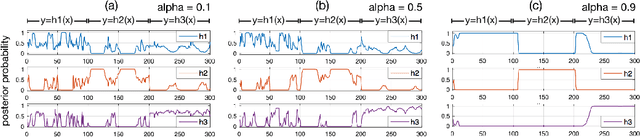
Brain-computer interfaces (BCIs) have enabled prosthetic device control by decoding motor movements from neural activities. Neural signals recorded from cortex exhibit nonstationary property due to abrupt noises and neuroplastic changes in brain activities during motor control. Current state-of-the-art neural signal decoders such as Kalman filter assume fixed relationship between neural activities and motor movements, thus will fail if this assumption is not satisfied. We propose a dynamic ensemble modeling (DyEnsemble) approach that is capable of adapting to changes in neural signals by employing a proper combination of decoding functions. The DyEnsemble method firstly learns a set of diverse candidate models. Then, it dynamically selects and combines these models online according to Bayesian updating mechanism. Our method can mitigate the effect of noises and cope with different task behaviors by automatic model switching, thus gives more accurate predictions. Experiments with neural data demonstrate that the DyEnsemble method outperforms Kalman filters remarkably, and its advantage is more obvious with noisy signals.