 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriving Scene Synthesis on Free-form Trajectories with Generative Prior
Paper and Code
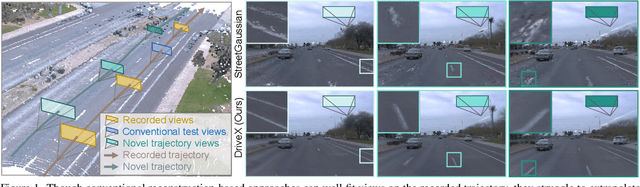

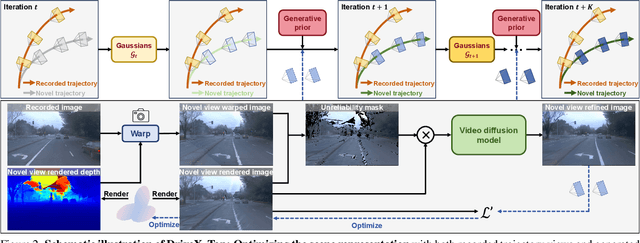

Driving scene synthesis along free-form trajectories is essential for driving simulations to enable closed-loop evaluation of end-to-end driving policies. While existing methods excel at novel view synthesis on recorded trajectories, they face challenges with novel trajectories due to limited views of driving videos and the vastness of driving environments. To tackle this challenge, we propose a novel free-form driving view synthesis approach, dubbed DriveX, by leveraging video generative prior to optimize a 3D model across a variety of trajectories. Concretely, we crafted an inverse problem that enables a video diffusion model to be utilized as a prior for many-trajectory optimization of a parametric 3D model (e.g., Gaussian splatting). To seamlessly use the generative prior, we iteratively conduct this process during optimization. Our resulting model can produce high-fidelity virtual driving environments outside the recorded trajectory, enabling free-form trajectory driving simulation. Beyond real driving scenes, DriveX can also be utilized to simulate virtual driving worlds from AI-generated videos.