 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain-invariant Progressive Knowledge Distillation for UAV-based Object Detection
Paper and Code
Aug 21, 2024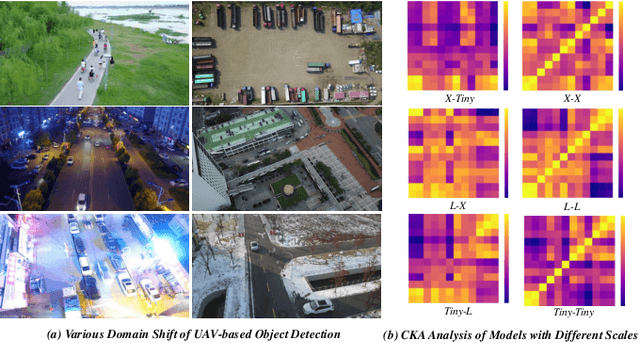
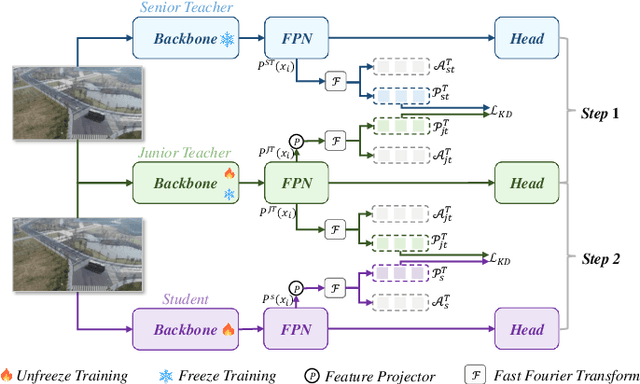
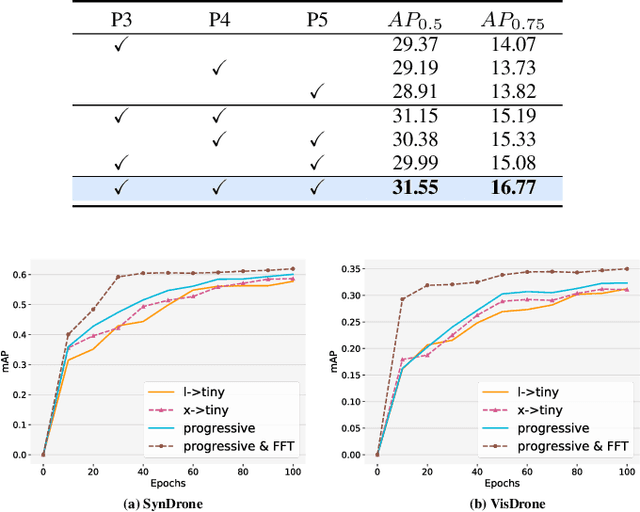
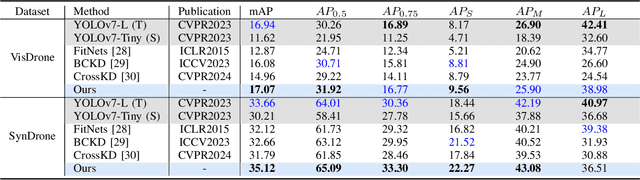
Knowledge distillation (KD) is an effective method for compressing models in object detection tasks. Due to limited computational capability, UAV-based object detection (UAV-OD) widely adopt the KD technique to obtain lightweight detectors. Existing methods often overlook the significant differences in feature space caused by the large gap in scale between the teacher and student models. This limitation hampers the efficiency of knowledge transfer during the distillation process. Furthermore, the complex backgrounds in UAV images make it challenging for the student model to efficiently learn the object features. In this paper, we propose a novel knowledge distillation framework for UAV-OD. Specifically, a progressive distillation approach is designed to alleviate the feature gap between teacher and student models. Then a new feature alignment method is provided to extract object-related features for enhancing student model's knowledge reception efficiency. Finally, extensive experiments are conducted to validate the effectiveness of our proposed approach. The results demonstrate that our proposed method achieves state-of-the-art (SoTA) performance in two UAV-OD datasets.