 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo's and Don'ts: Learning Desirable Skills with Instruction Videos
Paper and Code
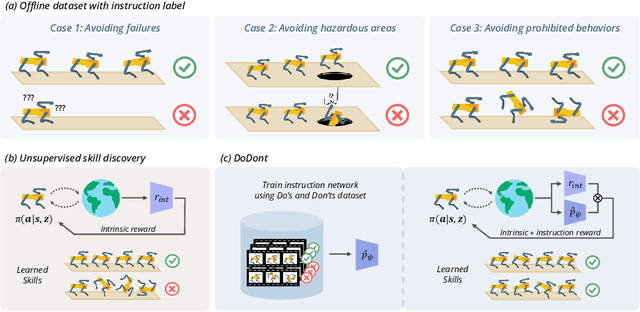


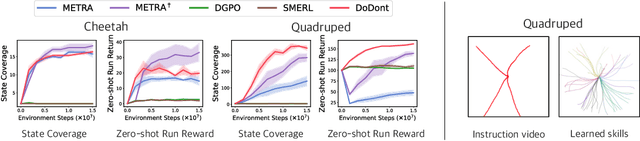
Unsupervised skill discovery is a learning paradigm that aims to acquire diverse behaviors without explicit rewards. However, it faces challenges in learning complex behaviors and often leads to learning unsafe or undesirable behaviors. For instance, in various continuous control tasks, current unsupervised skill discovery methods succeed in learning basic locomotions like standing but struggle with learning more complex movements such as walking and running. Moreover, they may acquire unsafe behaviors like tripping and rolling or navigate to undesirable locations such as pitfalls or hazardous areas. In response, we present DoDont (Do's and Don'ts), an instruction-based skill discovery algorithm composed of two stages. First, in an instruction learning stage, DoDont leverages action-free instruction videos to train an instruction network to distinguish desirable transitions from undesirable ones. Then, in the skill learning stage, the instruction network adjusts the reward function of the skill discovery algorithm to weight the desired behaviors. Specifically, we integrate the instruction network into a distance-maximizing skill discovery algorithm, where the instruction network serves as the distance function. Empirically, with less than 8 instruction videos, DoDont effectively learns desirable behaviors and avoids undesirable ones across complex continuous control tasks. Code and videos are available at https://mynsng.github.io/dodont/