 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributional Instance Segmentation: Modeling Uncertainty and High Confidence Predictions with Latent-MaskRCNN
Paper and Code
May 03, 2023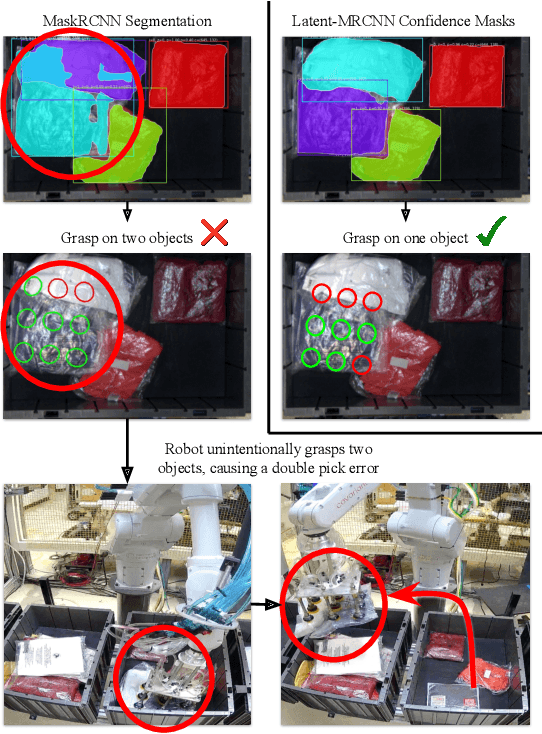

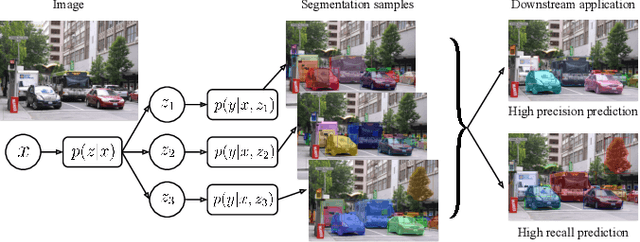
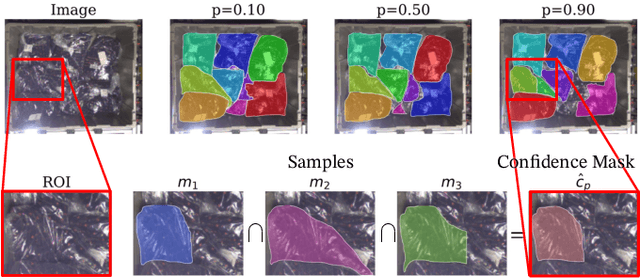
Object recognition and instance segmentation are fundamental skills in any robotic or autonomous system. Existing state-of-the-art methods are often unable to capture meaningful uncertainty in challenging or ambiguous scenes, and as such can cause critical errors in high-performance applications. In this paper, we explore a class of distributional instance segmentation models using latent codes that can model uncertainty over plausible hypotheses of object masks. For robotic picking applications, we propose a confidence mask method to achieve the high precision necessary in industrial use cases. We show that our method can significantly reduce critical errors in robotic systems, including our newly released dataset of ambiguous scenes in a robotic application. On a real-world apparel-picking robot, our method significantly reduces double pick errors while maintaining high performance.