 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Q-Learning with State Tracking for Multi-agent Networked Control
Paper and Code
Dec 22, 2020

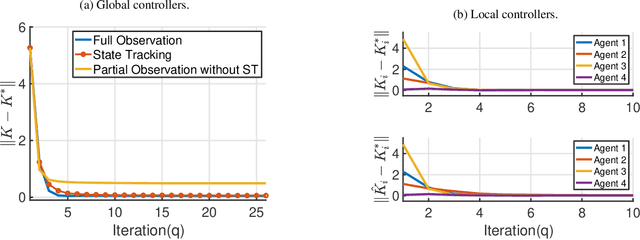
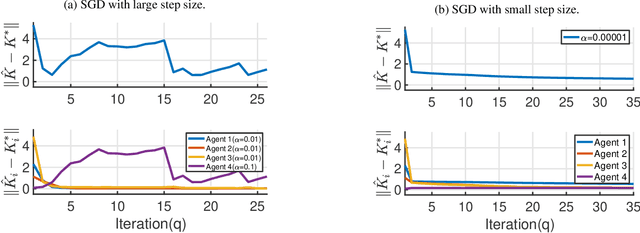
This paper studies distributed Q-learning for Linear Quadratic Regulator (LQR) in a multi-agent network. The existing results often assume that agents can observe the global system state, which may be infeasible in large-scale systems due to privacy concerns or communication constraints. In this work, we consider a setting with unknown system models and no centralized coordinator. We devise a state tracking (ST) based Q-learning algorithm to design optimal controllers for agents. Specifically, we assume that agents maintain local estimates of the global state based on their local information and communications with neighbors. At each step, every agent updates its local global state estimation, based on which it solves an approximate Q-factor locally through policy iteration. Assuming decaying injected excitation noise during the policy evaluation, we prove that the local estimation converges to the true global state, and establish the convergence of the proposed distributed ST-based Q-learning algorithm. The experimental studies corroborate our theoretical results by showing that our proposed method achieves comparable performance with the centralized case.