 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistilling Functional Rearrangement Priors from Large Models
Paper and Code
Dec 03, 2023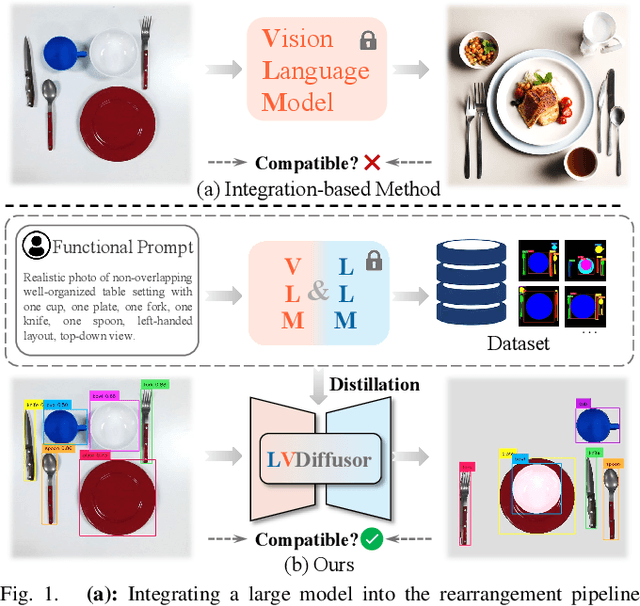
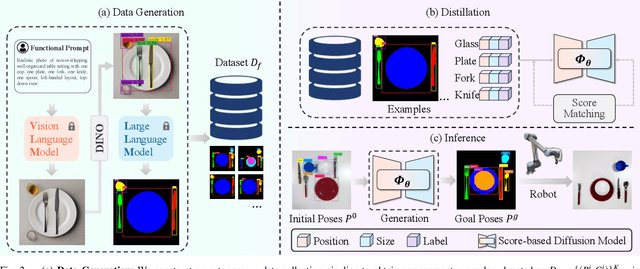
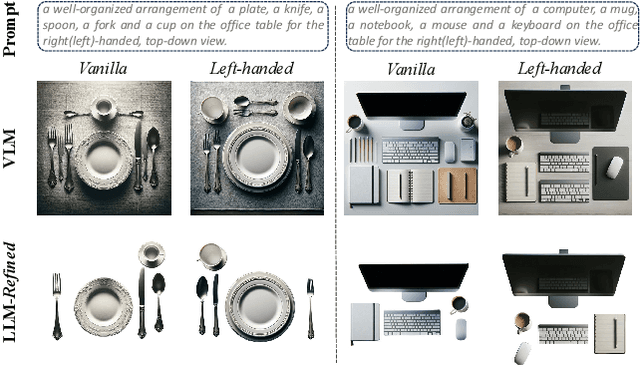

Object rearrangement, a fundamental challenge in robotics, demands versatile strategies to handle diverse objects, configurations, and functional needs. To achieve this, the AI robot needs to learn functional rearrangement priors in order to specify precise goals that meet the functional requirements. Previous methods typically learn such priors from either laborious human annotations or manually designed heuristics, which limits scalability and generalization. In this work, we propose a novel approach that leverages large models to distill functional rearrangement priors. Specifically, our approach collects diverse arrangement examples using both LLMs and VLMs and then distills the examples into a diffusion model. During test time, the learned diffusion model is conditioned on the initial configuration and guides the positioning of objects to meet functional requirements. In this manner, we create a handshaking point that combines the strengths of conditional generative models and large models. Extensive experiments on multiple domains, including real-world scenarios, demonstrate the effectiveness of our approach in generating compatible goals for object rearrangement tasks, significantly outperforming baseline methods.