 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Robotic Interaction Modes with Discrete Representation Learning
Paper and Code
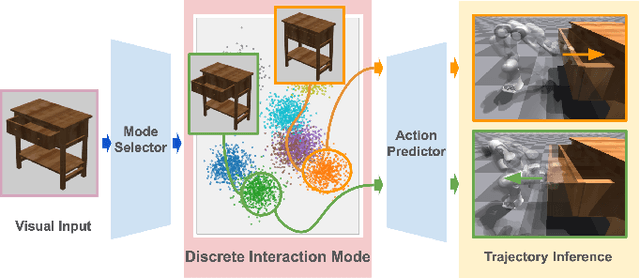
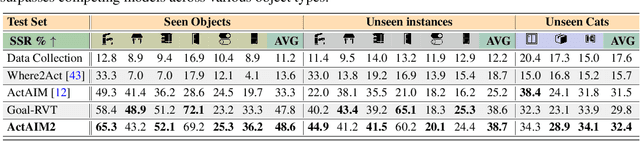
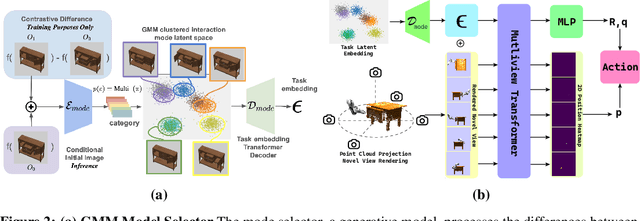

Human actions manipulating articulated objects, such as opening and closing a drawer, can be categorized into multiple modalities we define as interaction modes. Traditional robot learning approaches lack discrete representations of these modes, which are crucial for empirical sampling and grounding. In this paper, we present ActAIM2, which learns a discrete representation of robot manipulation interaction modes in a purely unsupervised fashion, without the use of expert labels or simulator-based privileged information. Utilizing novel data collection methods involving simulator rollouts, ActAIM2 consists of an interaction mode selector and a low-level action predictor. The selector generates discrete representations of potential interaction modes with self-supervision, while the predictor outputs corresponding action trajectories. Our method is validated through its success rate in manipulating articulated objects and its robustness in sampling meaningful actions from the discrete representation. Extensive experiments demonstrate ActAIM2's effectiveness in enhancing manipulability and generalizability over baselines and ablation studies. For videos and additional results, see our website: https://actaim2.github.io/.