 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect Behavior Specification via Constrained Reinforcement Learning
Paper and Code
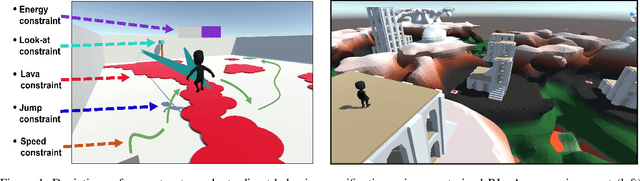
The standard formulation of Reinforcement Learning lacks a practical way of specifying what are admissible and forbidden behaviors. Most often, practitioners go about the task of behavior specification by manually engineering the reward function, a counter-intuitive process that requires several iterations and is prone to reward hacking by the agent. In this work, we argue that constrained RL, which has almost exclusively been used for safe RL, also has the potential to significantly reduce the amount of work spent for reward specification in applied RL projects. To this end, we propose to specify behavioral preferences in the CMDP framework and to use Lagrangian methods to automatically weigh each of these behavioral constraints. Specifically, we investigate how CMDPs can be adapted to solve goal-based tasks while adhering to several constraints simultaneously. We evaluate this framework on a set of continuous control tasks relevant to the application of Reinforcement Learning for NPC design in video games.