 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiagnosing and Augmenting Feature Representations in Correctional Inverse Reinforcement Learning
Paper and Code
Apr 13, 2023


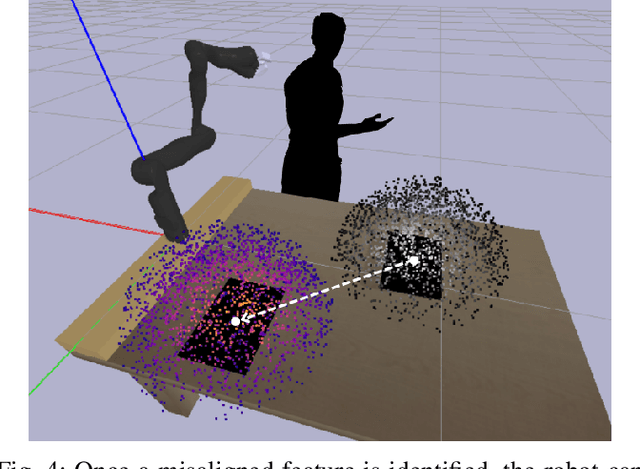
Robots have been increasingly better at doing tasks for humans by learning from their feedback, but still often suffer from model misalignment due to missing or incorrectly learned features. When the features the robot needs to learn to perform its task are missing or do not generalize well to new settings, the robot will not be able to learn the task the human wants and, even worse, may learn a completely different and undesired behavior. Prior work shows how the robot can detect when its representation is missing some feature and can, thus, ask the human to be taught about the new feature; however, these works do not differentiate between features that are completely missing and those that exist but do not generalize to new environments. In the latter case, the robot would detect misalignment and simply learn a new feature, leading to an arbitrarily growing feature representation that can, in turn, lead to spurious correlations and incorrect learning down the line. In this work, we propose separating the two sources of misalignment: we propose a framework for determining whether a feature the robot needs is incorrectly learned and does not generalize to new environment setups vs. is entirely missing from the robot's representation. Once we detect the source of error, we show how the human can initiate the realignment process for the model: if the feature is missing, we follow prior work for learning new features; however, if the feature exists but does not generalize, we use data augmentation to expand its training and, thus, complete the correction. We demonstrate the proposed approach in experiments with a simulated 7DoF robot manipulator and physical human corrections.