 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDI-Fusion: Online Implicit 3D Reconstruction with Deep Priors
Paper and Code
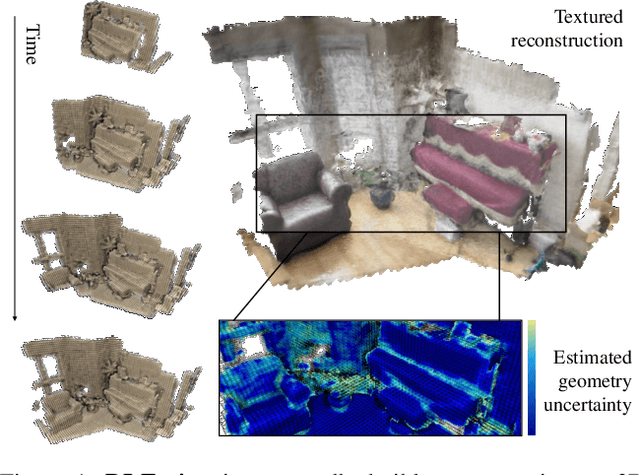
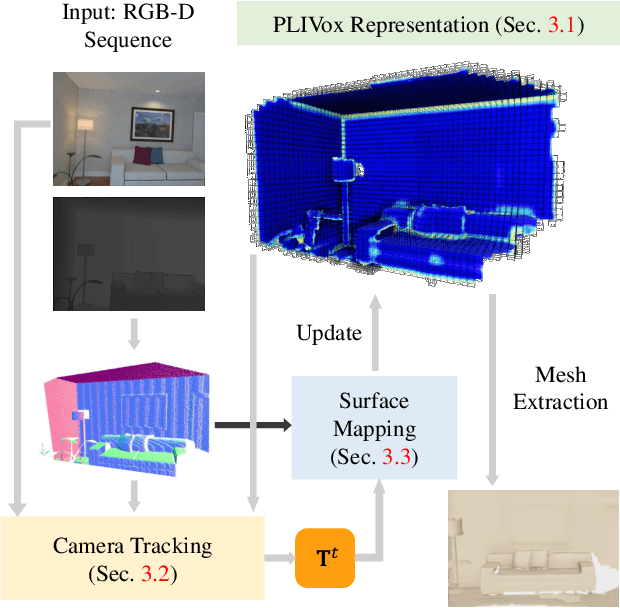
Previous online 3D dense reconstruction methods often cost massive memory storage while achieving unsatisfactory surface quality mainly due to the usage of stagnant underlying geometry representation, such as TSDF (truncated signed distance functions) or surfels, without any knowledge of the scene priors. In this paper, we present DI-Fusion (Deep Implicit Fusion), based on a novel 3D representation, called Probabilistic Local Implicit Voxels (PLIVoxs), for online 3D reconstruction using a commodity RGB-D camera. Our PLIVox encodes scene priors considering both the local geometry and uncertainty parameterized by a deep neural network. With such deep priors, we demonstrate by extensive experiments that we are able to perform online implicit 3D reconstruction achieving state-of-the-art mapping quality and camera trajectory estimation accuracy, while taking much less storage compared with previous online 3D reconstruction approaches.