Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Road Obstacles by Erasing Them
Paper and Code
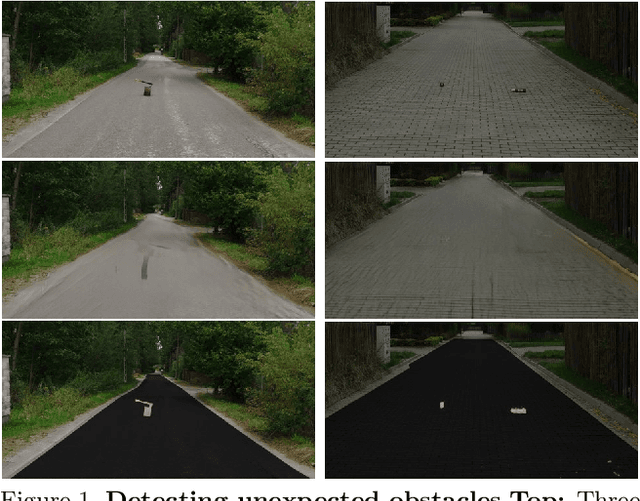
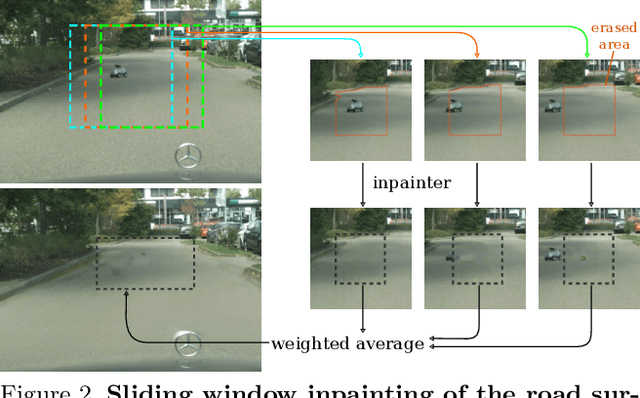
Vehicles can encounter a myriad of obstacles on the road, and it is not feasible to record them all beforehand to train a detector. Our method selects image patches and inpaints them with the surrounding road texture, which tends to remove obstacles from those patches. It them uses a network trained to recognize discrepancies between the original patch and the inpainted one, which signals an erased obstacle. We also contribute a new dataset for monocular road obstacle detection, and show that our approach outperforms the state-of-the-art methods on both our new dataset and the standard Fishyscapes Lost & Found benchmark.
View paper on