 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting and Mapping Trees in Unstructured Environments with a Stereo Camera and Pseudo-Lidar
Paper and Code
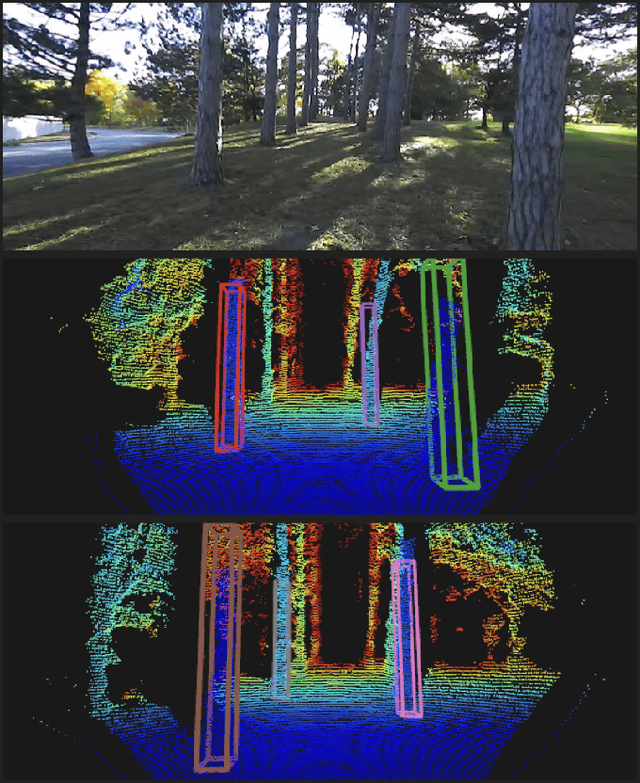
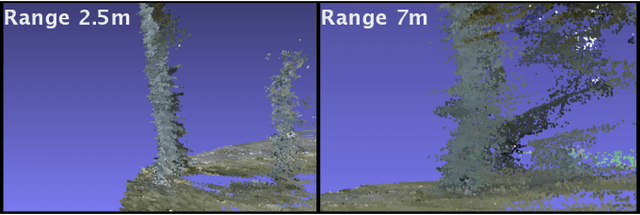
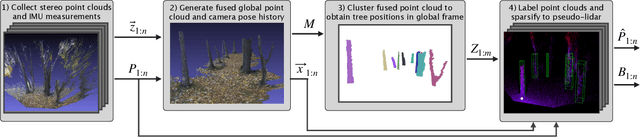

We present a method for detecting and mapping trees in noisy stereo camera point clouds, using a learned 3-D object detector. Inspired by recent advancements in 3-D object detection using a pseudo-lidar representation for stereo data, we train a PointRCNN detector to recognize trees in forest-like environments. We generate detector training data with a novel automatic labeling process that clusters a fused global point cloud. This process annotates large stereo point cloud training data sets with minimal user supervision, and unlike previous pseudo-lidar detection pipelines, requires no 3-D ground truth from other sensors such as lidar. Our mapping system additionally uses a Kalman filter to associate detections and consistently estimate the positions and sizes of trees. We collect a data set for tree detection consisting of 8680 stereo point clouds, and validate our method on an outdoors test sequence. Our results demonstrate robust tree recognition in noisy stereo data at ranges of up to 7 meters, on 720p resolution images from a Stereolabs ZED 2 camera. Code and data are available at https://github.com/brian-h-wang/pseudolidar-tree-detection.