 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigns, Motion Mechanism, Motion Coordination, and Communication of Bionic Robot Fishes: A Survey
Paper and Code
Jun 30, 2022
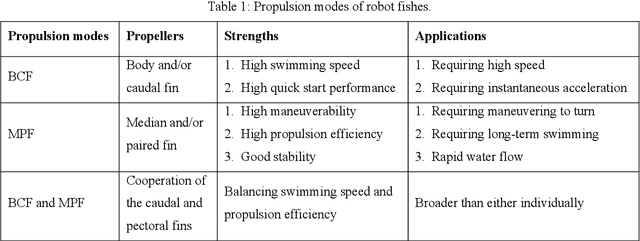
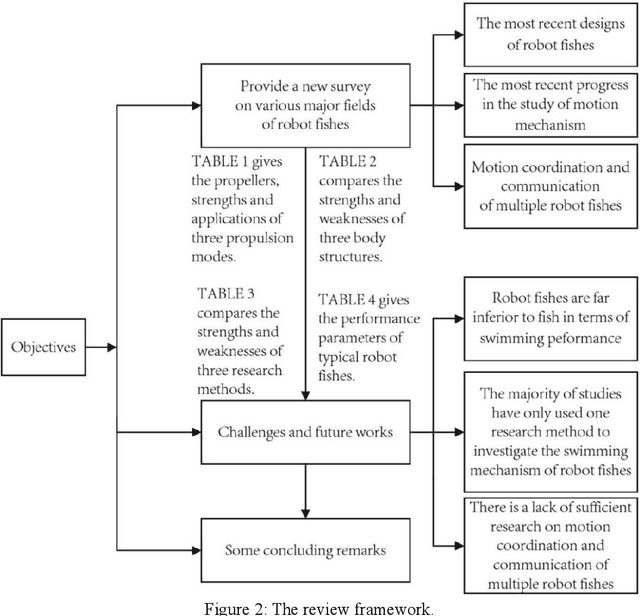
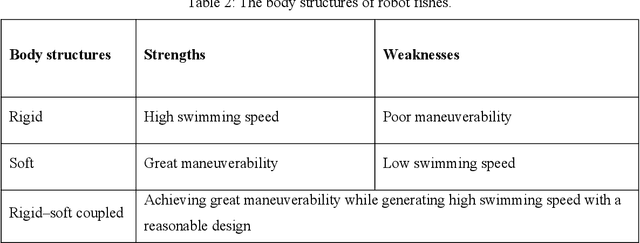
In the last few years, there have been many new developments and significant accomplishments in the research of bionic robot fishes. However, in terms of swimming performance, existing bionic robot fishes lag far behind fish, prompting researchers to constantly develop innovative designs of various bionic robot fishes. In this paper, the latest designs of robot fishes are presented in detail, distinguished by the propulsion mode. New robot fishes mainly include soft robot fishes and rigid-soft coupled robot fishes. The latest progress in the study of the swimming mechanism is analyzed on the basis of summarizing the main swimming theories of fish. The current state-of-the-art research in the new field of motion coordination and communication of multiple robot fishes is summarized. The general research trend in robot fishes is to utilize more efficient and robust methods to best mimic real fish while exhibiting superior swimming performance. The current challenges and potential future research directions are discussed. Various methods are needed to narrow the gap in swimming performance between robot fishes and fish. This paper is a first step to bring together roboticists and marine biologists interested in learning state-of-the-art research on bionic robot fishes.