Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Experiments for Calibration of Planar Anthropomorphic Manipulators
Paper and Code
Dec 03, 2012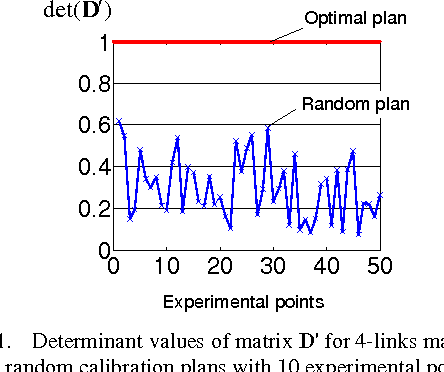
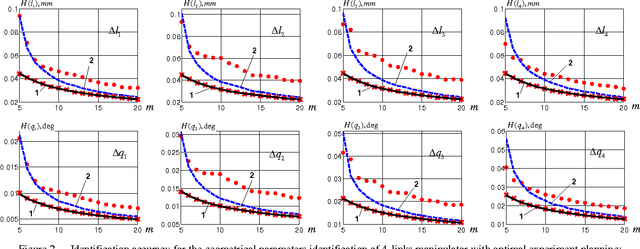
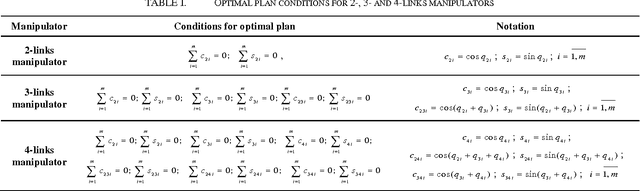
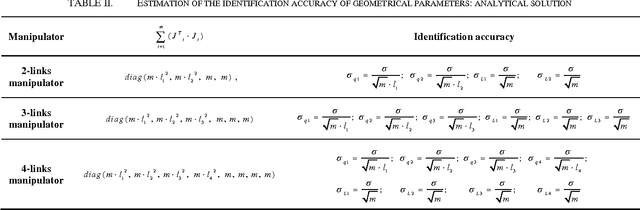
The paper presents a novel technique for the design of optimal calibration experiments for a planar anthropomorphic manipulator with n degrees of freedom. Proposed approach for selection of manipulator configurations allows essentially improving calibration accuracy and reducing parameter identification errors. The results are illustrated by application examples that deal with typical anthropomorphic manipulators.
* Advanced Intelligent Mechatronics (AIM), 2011 IEEE/ASME International
Conference on, Budapest : Hungary (2011)
View paper on