 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Adaptive Compliance Controllers for Safe Robotic Assembly
Paper and Code
Apr 22, 2022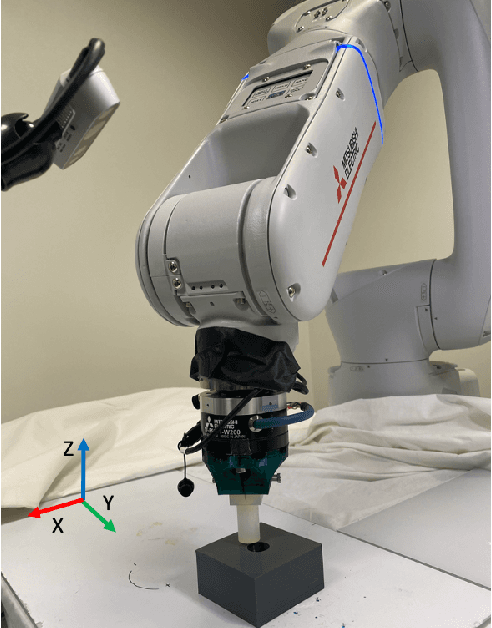
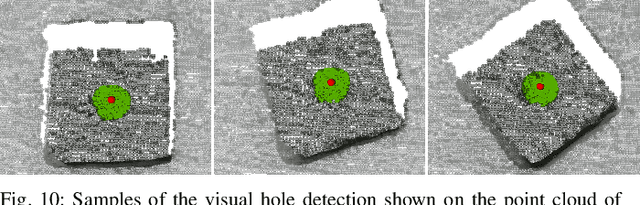

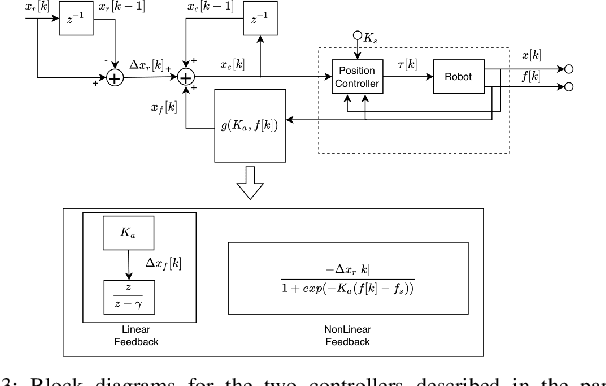
Insertion operations are a critical element of most robotic assembly operation, and peg-in-hole (PiH) insertion is one of the most widely studied tasks in the industrial and academic manipulation communities. PiH insertion is in fact an entire class of problems, where the complexity of the problem can depend on the type of misalignment and contact formation during an insertion attempt. In this paper, we present the design and analysis of adaptive compliance controllers which can be used in insertion-type assembly tasks, including learning-based compliance controllers which can be used for insertion problems in the presence of uncertainty in the goal location during robotic assembly. We first present the design of compliance controllers which can ensure safe operation of the robot by limiting experienced contact forces during contact formation. Consequently, we present analysis of the force signature obtained during the contact formation to learn the corrective action needed to perform insertion. Finally, we use the proposed compliance controllers and learned models to design a policy that can successfully perform insertion in novel test conditions with almost perfect success rate. We validate the proposed approach on a physical robotic test-bed using a 6-DoF manipulator arm.